倾斜摄影测量技术是在飞行载具上搭载多角度、多拼相机,对地面全要素信息进行数据采集、三维建模及输出真正射影像、大比例尺地形图等产品的综合技术手段。作为新型测绘手段,倾斜摄影技术已经在城市管理、国土规划、土地确权、宅基地管理等领域得到广泛应用。随着技术不断进步,飞行载具与倾斜航摄仪也向着轻型、微型化发展,不但使实景三维模型适用的领域更为广泛,也更能够满足用户对实景三维模型的高分辨率、高颜色还原度等要求。本文对倾斜摄影数据获取及处理的分类方法进行探讨,为各行业应用提供技术支持。
1 倾斜摄影测量技术构成
倾斜摄影技术发展至今,核心三部分是:飞行载具、倾斜相机、POS 系统。飞行载具可携带倾斜航摄仪进行航拍作业,沿航线、重叠率设计飞行路线;倾斜相机可分为三拼、五拼、十拼等,采用同步曝光方式采集地面影像信息;POS 系统在航摄仪内与每组曝光影像相对应,采用X、Y、Z、O、P、K等外方位元素信息对拍摄时的飞行姿态进行实时描述。无论是实景三维建模还是大比例尺测图应用,倾斜影像的后期处理质量取决于POS 系统的精度。根据项目的设计需求,对不同飞行载具、倾斜相机以及POS 系统进行搭配,形成有针对性的数据获取解决方案很有必要。
2 倾斜摄影测量解决方案细分
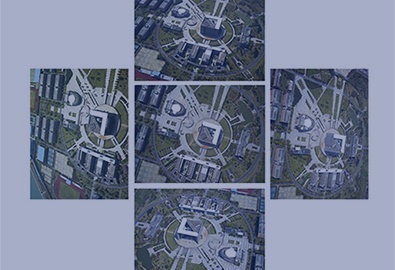
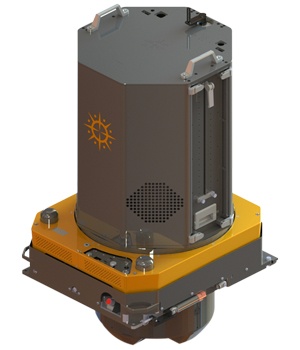
随着飞行仪器与材料行业的技术进步,以运输机搭载大型航摄仪为主的数据获取方式逐渐被打破。尤其在许多中小型项目实施中,大型运输机的限制太多,不利于成本控制。空域规定的放宽、中低空轻型飞行器价格下降均为倾斜摄影提供更多可能。引入模糊控制和大容量电池技术后,无人机的飞行稳定性更高、续航时间更长,成为超低空精细化建模的最优选择。表1 从飞行高度、建模特点及精度等多个方面对倾斜摄影测量的解决方案进行细分。飞行载具与倾斜相机如图1 所示。

图1 典型飞行载具与倾斜相机
2.1 高空飞行载具与相机
运-12 等大型运输机适用于600 m 以上高度层的航空摄影飞行任务,可携带60 kg 以上的大型倾斜航摄仪拍摄作业,如徕卡RCD30、TOPDC、SWDC -5 等。运输机飞行姿态稳定,飞行时间长(7 h以上),在100 km2 以上的大面积航空作业中具有显著优势。高空数据获取的优点是:倾斜航摄仪的POS 信息精确,对控制点需求少,经过空三匹配后能构建满足测绘级精度的实景三维模型,且单位面积的模型容量小,应用方便。高空数据获取的缺点是:对天气要求高,机场与飞行员拉升作业成本;由于飞行高度原因,拍摄需穿越雾霾层,导致影像颜色失真、单位面积的模型分辨率低。因此,高空飞行方案适用于数字城市、智慧城市建设中的市域建成区三维本底数据获取。

表1 倾斜摄影测量解决方案细分
2.2 中空飞行载具与相机
出于对模型颜色、分辨率和飞行成本的考虑,采用轻型飞行器的中空飞行方案应运而生。飞行载具采用直升机、动力三角翼等,在300 ~600 m 中空作业。所携带倾斜相机由去掉背板的多台单反相机组成,设置有固定倾角云台与同步曝光系统,单日作业15 ~30 km2。中空数据获取优点:场地限制条件少,起降方便,转场快捷,作业高度对军民空域影响小。所构建模型颜色真实,分辨率较高。中空数据获取缺点:动力三角翼飞行受气流影响大、姿态不稳定,所携带的倾斜相机尚无精确的POS 解决方案,无POS 影像处理会降低实景三维模型精度。因此,中空方案适用于二、三级城市,以及山区、景区等低于70km2 的三维本底数据获取。
2.3 低空飞行载具与相机
为进一步提高分辨率、颜色信息及降低飞行成本,已研制出无人机挂载微型倾斜相机的数据获取方案。由于无人机滞空时间短、载重有限,因此倾斜相机多采用镜头式相机嵌入钛金云台制成,在300 m 以下的低空作业,多应用于5 ~10 km2的厂区、高校、景点、建筑群的精细化建模。低空数据获取优点:起降方便、人员少、成本低;飞行姿态稳定,POS 数据较准确;构建模型颜色逼真,分辨率高,数据精度较好。低空数据获取缺点:作业效率低,平均每天0.5 ~1 km2,导致大区域建模时的颜色连续性差。
3 倾斜摄影数据处理方案
3.1 携带高精度POS信息的数据处理
在市面较常见的倾斜航摄解决方案中,倾斜航摄仪与无人机携带的微型航摄系统均具有较高精度的POS 数据,有利于精确还原空三网,在无控情况下亦可保证较高的相对精度。该数据适合用街景工厂进行处理,街景工厂的处理原则是满足空三网精度要求后方可进行建模工作,意味着建模前即对模型精度有很好的控制。而Smart3D 软件以开源sift 算法为建模核心的全程无干预处理,在POS 信息薄弱的部分,自动以影像拼接为建模与贴图方案。虽然会取得较好的视觉效果,但会降低模型精度。因此,在POS 数据较好的情况下,应以测绘级精度作为三维数据处理目标。
3.2 携带弱/无POS 信息的数据处理
对于动力三角翼等受气流影响较大的飞行载具,所获取的倾斜影像存在旋偏角大于6°,无准确POS 数据的情况。街景工厂不支持弱/无POS 倾斜数据的直接导入,需要在无人机模块(EOless)中粗略恢复初始POS 信息,方可进行空三匹配与建模,但效果不甚理想,效率也较低。Smart 3D 软件可直接处理无POS 倾斜影像数据,仅需添加若干控制点进行绝对定位即可,虽然无法保障实景三维精度,但可快速建模,为警务、城管等弱精度应用提供快速解决方案。
4 结束语
倾斜摄影测量的多种解决方案各有优缺点,应用前要充分考虑到项目工期、成本及成果精度优先还是效果优先等要求,适配最优解决方案。一些应用细节要充分考虑,例如,相机分辨率不能完全代表成像质量,POS 系统在多次使用后需要重新校正等。因此,在确定方案后,还应获取小块示范影像数据进行成像质量、模型制作评估,综合考虑后进行项目实施。
猜你喜欢:

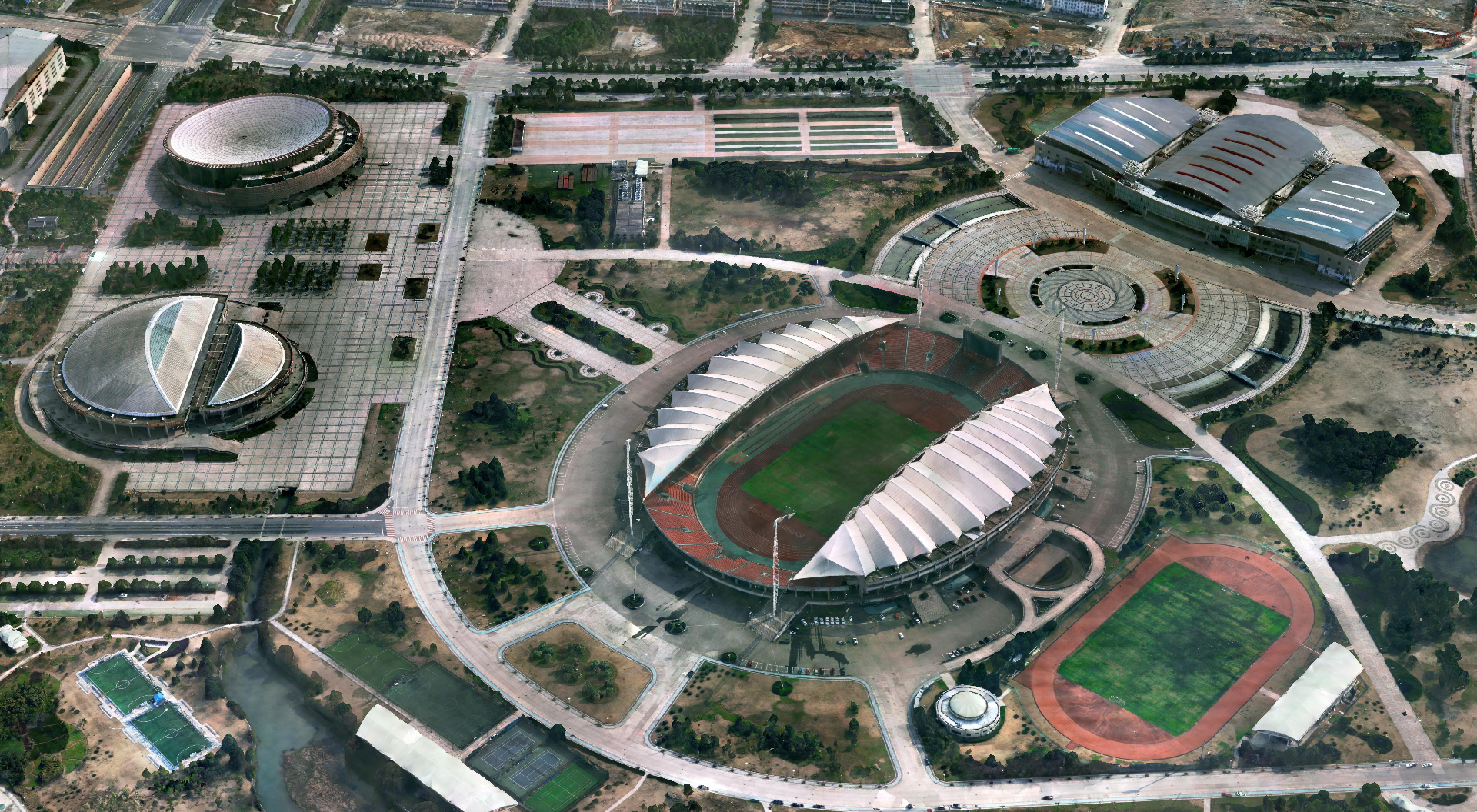
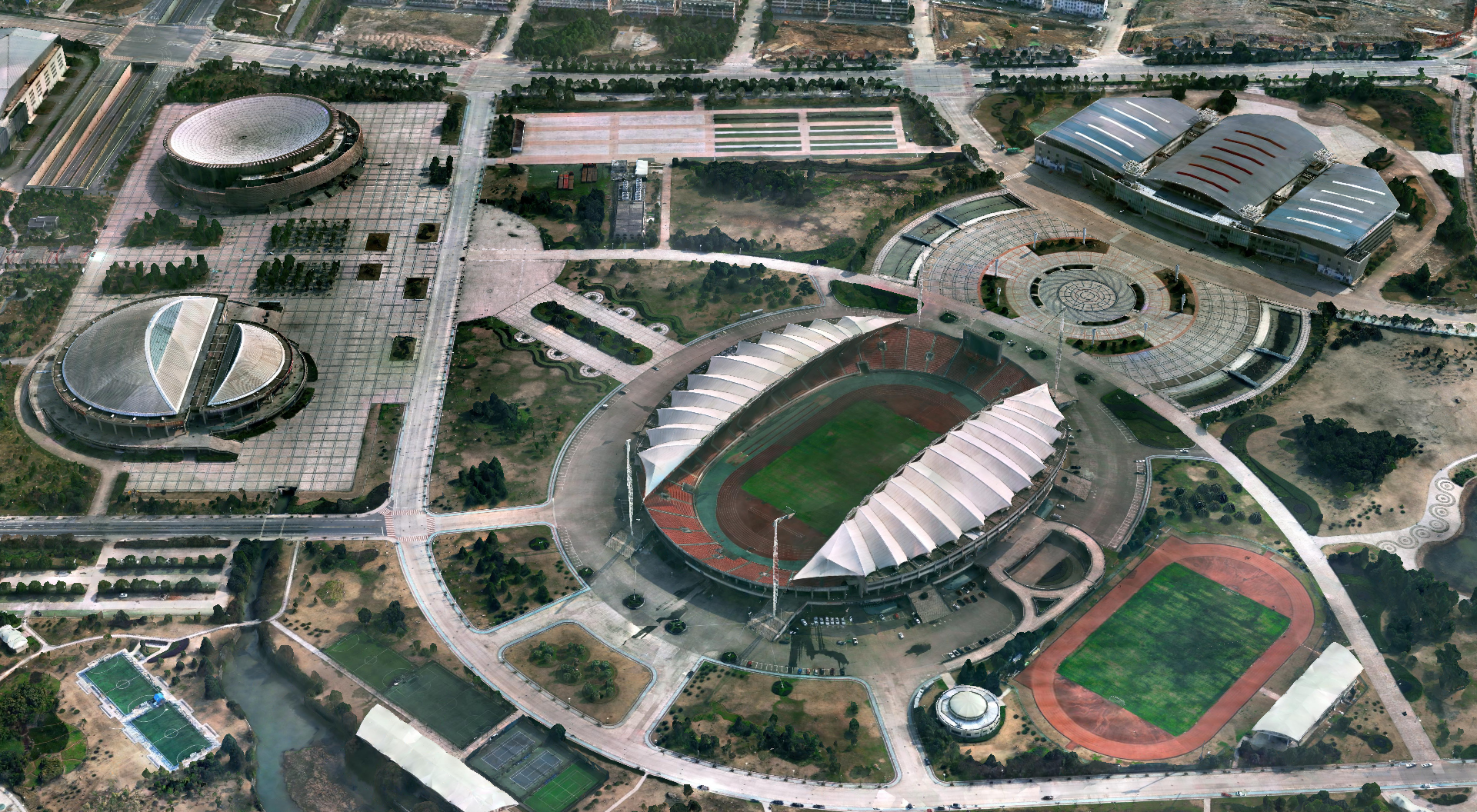
上虞全域三维实景项目要求航摄面积体量大、分辨率高,我司运用自主研发设备AIMS航空集成多传感器航摄仪,化挑战为机遇。一次飞行同步获取了1226km²范围内,分辨率优于0.03m的倾斜影像...
实景三维中国建设是新型基础测绘的主要任务和成果形式,带动“以地理要素为视角和对象...
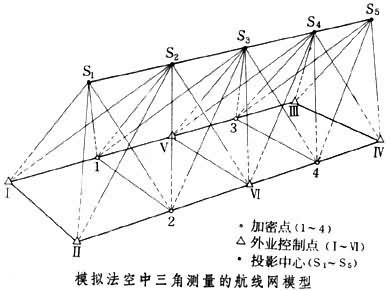
航空摄影测量技术中的空中三角测量,是在立体摄影测量实践中参照少部分野外控制点,并...
实景三维倾斜建模是指采用倾斜摄影技术制作的实景三维模型,也可以拆分为两个概念来解...
倾斜摄影用于实景三维建模,倾斜摄影是近年来航测领域逐渐发展起来的新技术,相对...

倾斜航摄是近年来发展起来的一项新技术,基于倾斜摄影测量模型重建技术因其数据采集成本...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English