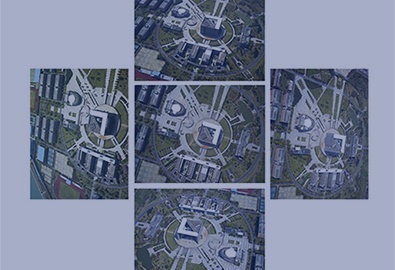
另外,倾斜航空摄影技术在近年来的飞迅发展,通过密集匹配方法从多角度航空倾斜影像中获取具有立面信息的高密度点云,被称为倾斜摄影测量点云。然而,这些点云数据并不具备语义信息,点云分类成为点云应用的关键所在,高精度的点云分类具有极大的研究价值和现实意义。
目前,针对激光点云分类的方法较多,但和倾斜航空摄影技术相比,激光雷达技术扫描事获取建筑物立面的点较少,所以倾斜摄影测量点云的应用有着广泛的需求,有学者提出一种面向对象的倾斜摄影测量点云监督分类方法。
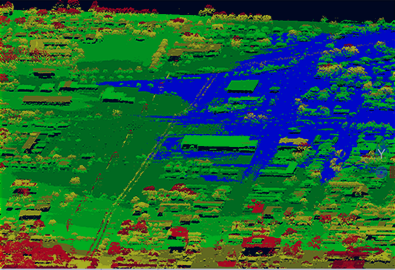
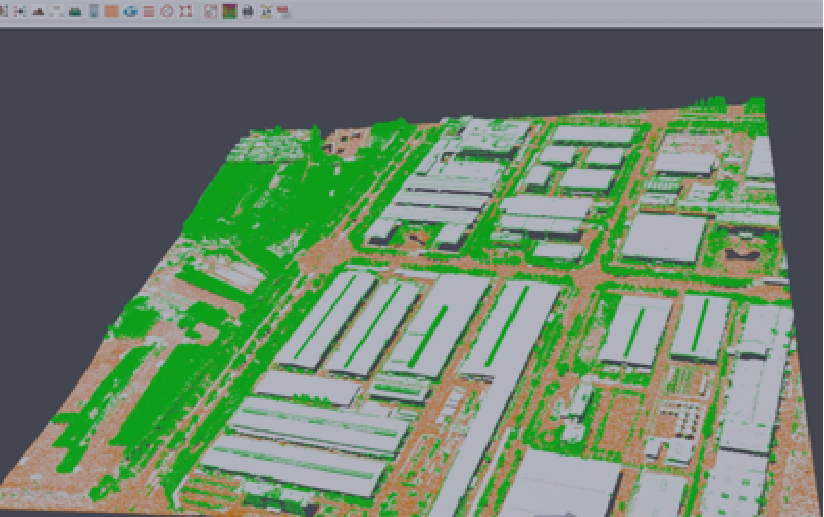
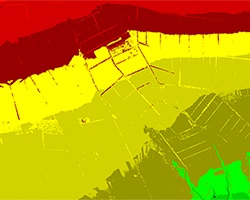
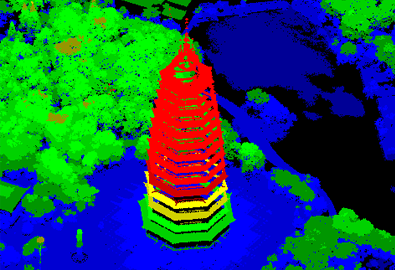
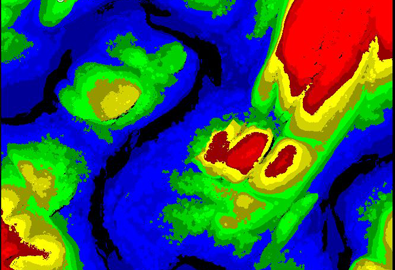
由于在监督分类方法中,随机森林算法和 SVM 分类精度相当,且在计算效率、对异常值和噪声的鲁棒性、内部误差估计和变量重要性等方面具有优越性,因此本文采用随机森林分类器进行分类。根据目标对象的颜色和几何等特征将点云分成屋顶、地面、植被和立面 4 类。
本文分类方法采用的特征如下:
1)法向量nx,ny和nz。每一点的法向量定义为对其k邻域内的点进行最小二乘以和得到的平面法向量。
2)颜色信息B,G和R。其值分别为影像每个像素蓝光、绿光和红光3通道的DN值,在影像密集匹配时直接获取。
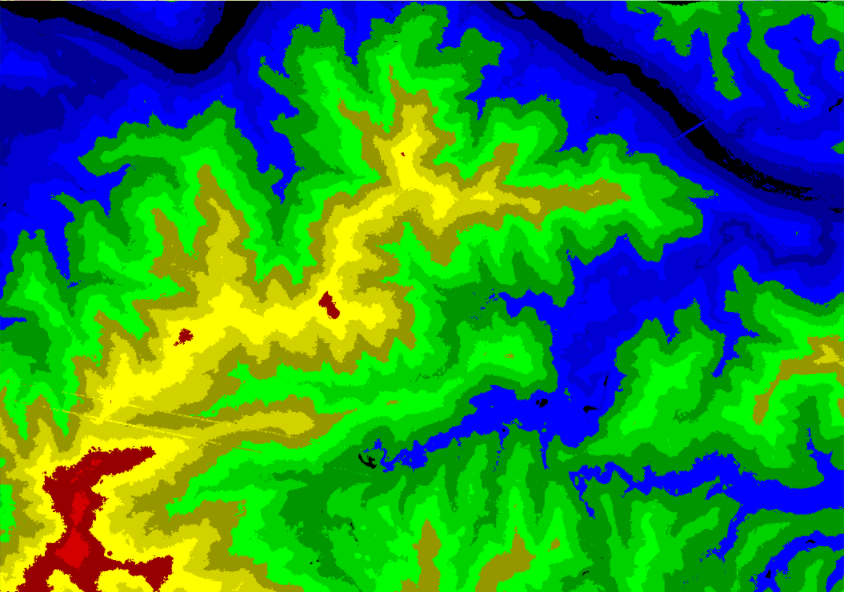
3)归一化高程Nz。本文利用文献(HuH,DingYL,ZhuQ,et...)方法分离地面点并内插得到数字地形模型(digitalterrainmodel,DTM),然后每一点减去DTM的对应高度以获取归一化高度。
4)绿信比Gr。由于植被区域绿光波段DN值一般比红光和蓝光波段DN值高,因此本文采用绿信比来区分植被[8],即Gr=G/(R+G+B)。
5)局部拟合平面垂直度fv。假设平面方程为ax+by+cz+d=0,式中:x,y和z为点的坐标;a,b,c和d为平面拟合方程的参数。那么,fv定义为fv(pi)=|c|,式中pi为第i个点。fv的取值范围为(0,1),当拟合平面接近于铅垂面时,fv的值趋近于1。
6)局部平面拟合度fp。通常情况下,建筑物屋顶比较规则,多由平面组成,而植被区表面不规则,因此平面拟合度可以作为一个分类特征,即

式中:n为邻域点数;dj为第j个邻域点到平面的距离。计算平面拟合度时,利用一定邻域内的点拟合一个平面,然后计算所有拟合该平面的点到该平面距离的负数指数幂作为fp。fp的取值范围为(0,1),局部邻域越接近于平面,fp的值越小。
1.2对象分割与特征计算
采用的点云软件生成的密集点云,每一张影像对应一个点云文件。并采用间接的方法获得点云对象,即首先利用简单线性迭代聚类(SLIC)算法将点云对应的影像分割成超像素,该算法仅需要指定超像素的数量m;然后,利用共线方程将点云投影到影像上;再根据超像素分割的结果将点云聚类成不同的超体素,作为分类的对象。
在获取了点云对象之后,根据对象中所包含的单点的特征向量,采用公式计算对象的特征向量,即

式中:fo表示对象的特征向量;fl表示第l个单点的特征向量;N表示一个对象中包含的单点数量。
1.3随机森林算法
随机森林算法由Breiman于2001年提出。该算法的基本思想是用随机的方式建立一个森林,森林中含有很多决策树,每一棵树都是二叉树的形式。在生成森林之后,当输入新的样本时,每棵决策树便会对其进行判断,然后根据所有的判断结果选出票数最多的作为最终的分类结果。
针对待处理的点云数据,首先选取了4个类别(建筑物屋顶、地面、植被和建筑物立面)的少量样本数据,然后选取20%的样本作为训练数据,剩余的样本作为测试数据。
这里将将点云特征构成的10维特征向量直接输入到随机森林分类器中,在训练分类器之后,利用测试数据评价分类正确率。由于对象的数量对分类结果有较大影响,因此本文测试了不同对象数量的分类效果,然后选择效果较好的分类器对所有待处理点云(即总体数据)进行分类。
1.4后处理优化
初始分类结果中不可避免地存在错误分类,因此进一步利用上下文关系对初始分类结果进行优化。
首先,对分类结果进行联通分析,将具有邻接关系的同类点云聚成簇;然后,根据上下文关系对其进行优化处理,具体包括以下3个规则:
①对于屋顶簇,如果屋顶周围没有立面,则认为该屋顶是错分的,根据其邻域中所占比例最高的类别来修正其类别;
②对于地面簇,如果地面的周围只有屋顶,则将该地面修正为屋顶;
③对于立面簇,如果立面周围没有屋顶,则该立面是错分的,根据其邻域中所占比例最高的类别来修正其类别。
版权声明:文章来源于网络,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。
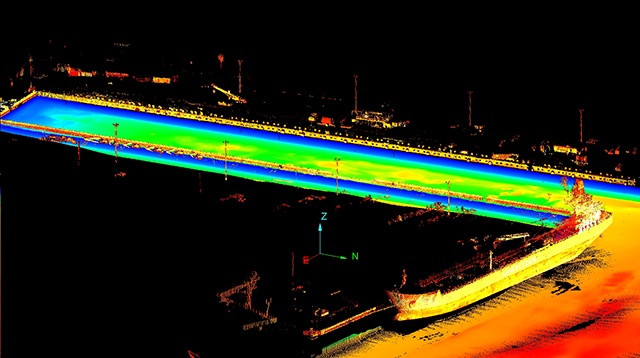
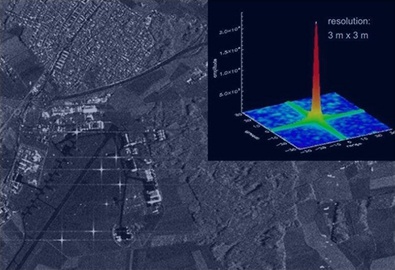
机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布不均匀的离散点云数据,如何对这些数据进行滤波是当前国内外研究的热点,现有滤波算法大多都是基于...

近日,湖北省经信厅发布《2022年度湖北省创新产品应用示范推荐目录》(以下简称《目录...
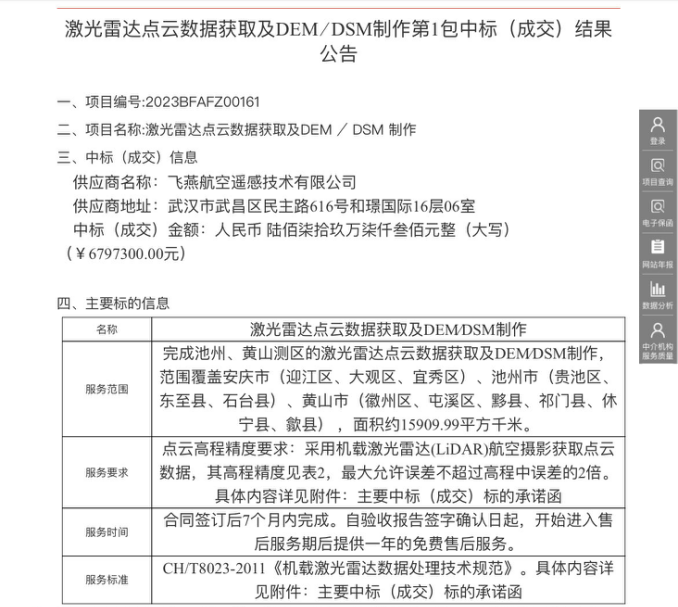
近日,飞燕遥感喜中2023年安徽省机载激光雷达点云项目,中标金额6,797,300元。 此次...
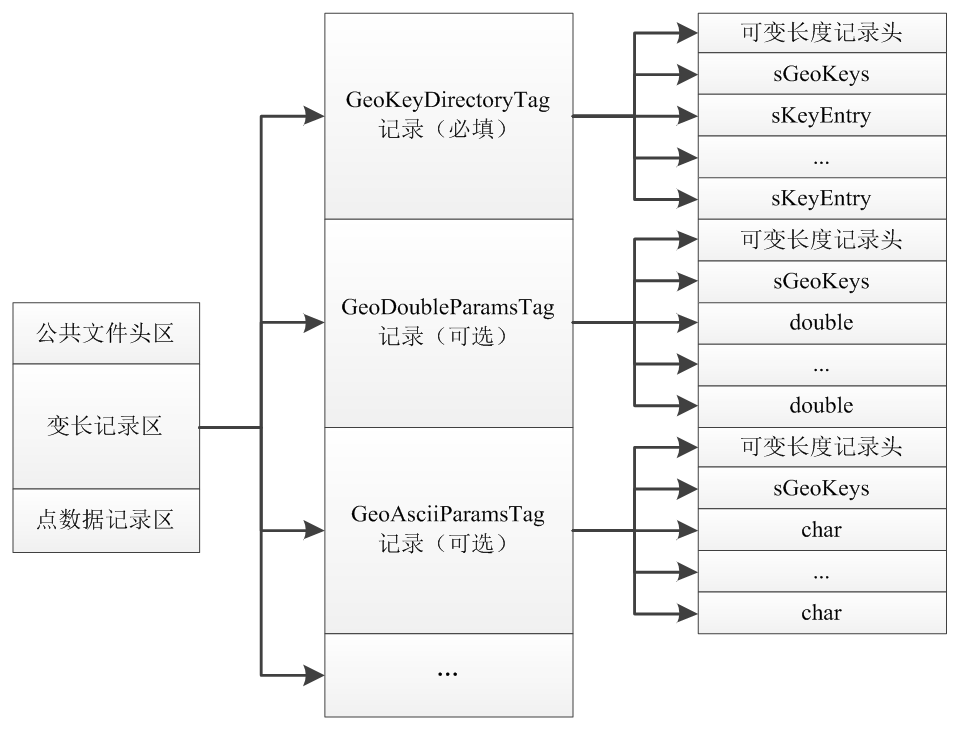
LAS 1.2是目前机载LiDAR中用的最多的点云文件格式之一。一个符合LAS 1.2 标准的LIDAR ...
机载LiDAR技术是激光测距技术、高精度动态载体姿态测量技术和高精度动态GPS差分定位技...
目前地形数据获取主要有三种方式:现场实测、三维正射影像转数字高程模型DEM、激光三维...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English