航空摄影测量的主题,是将地面的中心投影(航摄像片)变换为正射投影(地形图)。这一问题可以采取许多途径来解决。如图解法、光学机械法(亦称模拟法)和解析法等。在每一种方法中还可细分出许多具体方法,而每种具体方法又有其特有的理论。其中有些概念和理论是基础性的,带有某些共性,如像片的内方位元素和外方位元素,像点同地面点的坐标关系式,共线条件方程,像对的相对定向,模型的绝对定向和立体观测原理等。
内方位元素用以确定摄影物镜后节点(像方)同像片间的相关位置。利用它可以恢复摄影时的摄影光线束。内方位元素系指摄影机主距 f和摄影机物镜后节点在像平面的正投影位于框标坐标系中的坐标值(x0,у0)。这些数值通过对航摄机鉴定得出,故内方位元素总是已知的。
确定摄影光线束在摄影时的空间位置的数据,叫做像片或摄影的外方位元素。外方位元素有6个数值,包括摄影中心S在某一空间直角坐标系中的3个坐标值Xs、Ys、Zs和用来确定摄影光线束在空间方位的3个角定向元素,如φ、ω、k角。这些外方位元素都是针对着某一个模型坐标系O-XYZ而定义的。模型坐标系的X坐标轴近似地位于摄影的基线方向,Z坐标轴近似地与地面点的高程方向相符。在模型坐标系内所建立的立体模型必须在其后经绝对定向的过程才能取得立体模型的正确方位。
像点ɑ在以摄影中心S为原点,摄影主光轴z坐标轴的像空间坐标系(S-xуz)中的坐标为xɑ、уɑ、zɑ=-f。此时以S为原点再建立一个辅助坐标系(S-uvw)其中3个坐标轴u、v、w分别与模型坐标的3个坐标轴X 、Y、Z相平行。ɑ点在此辅助坐标系中的坐标设为uɑ、vɑ、wɑ,则其变换关系式为:

R为旋转矩阵,它是由像空间坐标系与辅助坐标系的相应坐标轴间夹角的余弦(称方向余弦)组成,而这些方向余弦都是像片的3个角定向元素的函数。这是一个重要的基本公式,因为有很多理论公式或作业公式就是在此基础上进一步演化得出的。例如,在解析摄影测量中有广泛应用的“共线条件方程式”,就是根据它的反算式作进一步演化得出。
确定像片对相互位置关系的过程。模拟法相对定向是在立体测图仪上进行。其理论基础是使空间所有的同名光线都成对相交。当同名光线不相交时,则在仪器的观测系统中可以观察到上下视差(常用 Q表示)。上下视差就是两条同名射线在空间不相交时在垂直于摄影基线方向中存在的距离。此时将投影器作微小的直线移动或转动,就可以消除这个距离。理论上只要能够在适当分布的 5个点处同时消除该点处的上下视差,就认为已经获得在这个立体像对内全部上下视差的消除,从而完成了相对定向,得出立体模型。相对定向的解析法是在像片上量测各同名像点的像点坐标,例如对左像片为x1、у1,对右像片为x2、у2。根据同名射线共面条件的理论可以推导出这些量测值与相对定向元素的关系式。理论上测得5对同名像点的像点坐标值,就能够解算出该像片对的 5个相对定向元素。同名点在左右像片上的纵坐标差(у1-у2)习惯上也称之为上下视差,用符号q 表示。
在摄影测量中,相对定向所建立的立体模型常处在暂时的或过渡性的模型坐标系中,而且比例尺也是任意的,因此必须把它变换至地面测量坐标系中,并使符合规定的比例尺,方可测图,这个变换过程称为绝对定向。绝对定向的数学基础是三维线性相似变换,它的元素有7个,3个坐标原点的平移值,3个立体模型的转角值和1个比例尺缩放率。

立体观察的原理是建立人造立体视觉,即将像对上的视差反映为人眼的生理视差后得出的立体视觉。得到人造立体视觉须具备3个条件:①由两个不同位置(一条基线的两端)拍摄同一景物的两张像片(称为立体像对或像对);②两只眼睛分别观察像对中的一张像片;③观察时像对上各同名像点的连线要同人的眼睛基线大致平行,而且同名点间的距离一般要小于眼基线(或扩大后的眼基距)。若用两个相同标志分别置于左右像片的同名像点上,则立体观察时就可以看到在立体模型上加入了一个空间的测标。为便于立体观察,可借助于一些简单的工具,如桥式立体镜和反光立体镜。对于那种利用两个投影器把左右像片的影像同时叠合地投影在一个承影面上的情况,可采用互补色原理或偏振光原理进行立体观察,并用一个具有测标的测绘台量测。
近日,2025年度中国地理信息产业优秀工程奖评选结果公布,飞燕遥感凭借“中山市2023—2024年基础地理信息数据更新项目”荣获金奖,凭借“佛山市实景三维数据建设(一期)项目”摘得银...

近日,飞燕遥感再次凭借卓越的技术实力与可靠的执行能力,顺利完成新一轮江苏省全省...

该成果的成功使用,在厦门地区形成了长效机制,成为了政府基础决策,证明了航空遥感测...

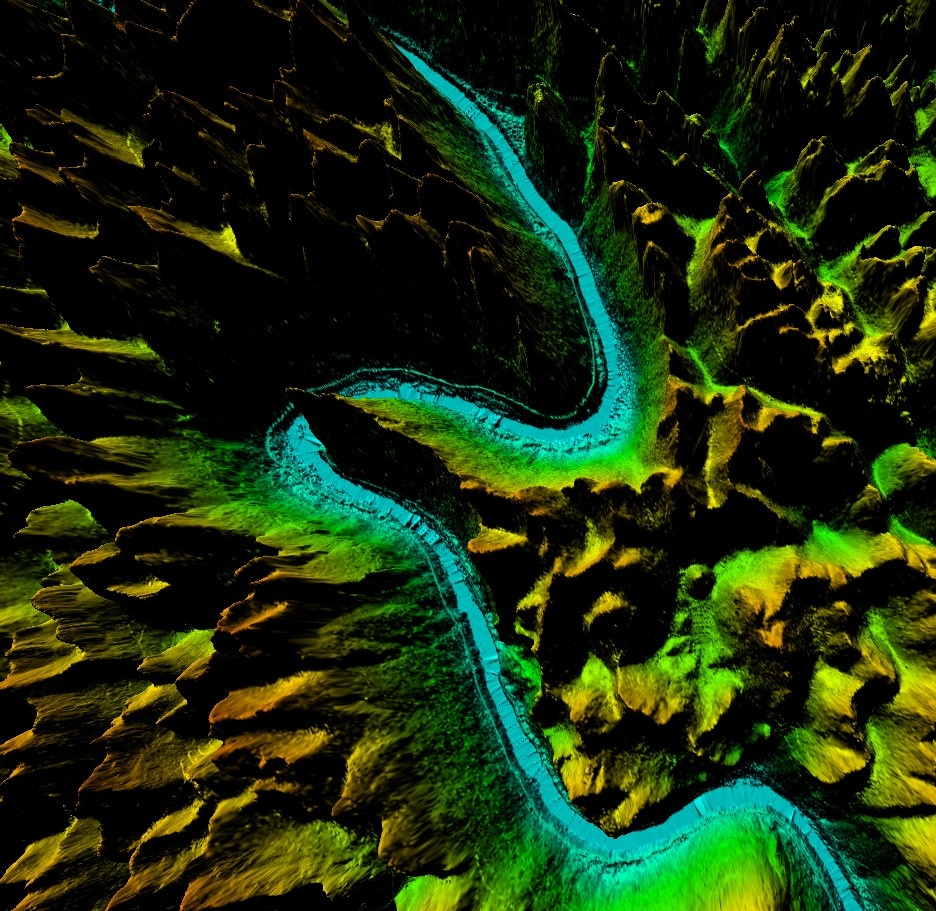
过去,森林资源调查以人工地面调查为主,不仅耗时久、效率低,数据精度也不高。现在,...

景三维作为真实、立体、时序化反映人类生产、生活和生态空间的时空信息,是国家重要的...

该设备是目前国内唯一实现了正射真彩色影像航摄仪、激光雷达航摄仪、倾斜摄影航摄仪、...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019-2025 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English