建模技术是虚拟现实中的技术核心,虚拟现实对世界反映的真实性状况与建模技术有着密切的关系。随着计算机软硬件水平的提升和可视化技术的快速发展, 模型重建技术也更加成熟。传统的建模方法按技术手段和表现形式分为两种 :基于几何模型建模技术和基于图像建模技术。
常用的三维建模软件有 :3DMax、AutoCAD、Google SketchUp 等。基于几何模型的建模技术操作简单,但数据采集和建模流程费时费力 ;基于图像的建模技术对数据精度的要求较高,针对规则物体建模效果较好,但不适用于复杂物体。
如何高效、准确地获得数据、建立模型,成为当前测绘遥感领域普遍关注的焦点。
作为近年来出现的新型模型重建技术,激光点云建模技术拓展了模型重建技术的实现手段 , 在数字城市、工程规划、古建筑保护等众多领域发挥着重要作用。本文通过新技术与传统方法的对比,突出了激光点云建模技术的优势及应用前景。
一、三维建模方法的应用研究
三维建模主要环节包括:空间数据获取、数据处理、模型建立、模型可视化。三维空间模型分为地形模型和地物模型。
地物模型非常复杂,又可以归纳为:
建筑物模型(简单建筑物、复杂建筑物);
构筑物模型(雕像);
道路模型 ;
环境景观模型(草地、树木、河流等);
其他地物模型(路灯、垃圾桶等)。
地物有自身的空间属性特征 , 需要采用不同的数据结构和建模方法。
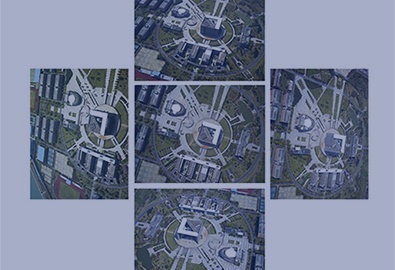
本文以某地区广场为例,分别采用传统3DMax 建模和激光点云建模技术进行主要模型重建, 深入分析了二者的工作流程及特点。
1、 传统建模方法的应用
传统几何模型建模技术工作原理是 :以矢量几何数据为基础,采用模型构建软件建立三维模型,模型纹理图片用数码相机获得,再经过照片纠正处理后进行贴图。采用 3DMax、AutoCAD 软件进行模型构建, 是几何模型建模技术最常用的方法。利用 3DMax 软件完成区域内主要场景的建模 , 技术流程如图 所示。

3DMax 建模流程图
2、 激光点云的建模方法应用
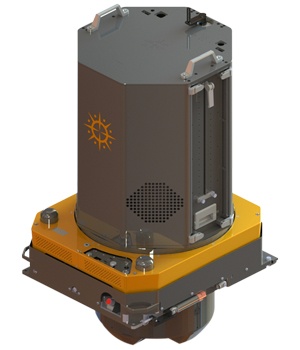
激光点云建模技术是根据三维激光扫描仪获取包含三维坐标的点云数据,通过数据预处理和配准处理等操作,进一步提取有效数据,进行曲面和实体构造, 最终得到三维模型。
工作步骤包括 :
① 数据采集,通过三维激光扫描系统实地获取目标实体的点云数据、纹理信息 ;
② 数据处理,包括多站点数据配准、拼接、去噪、重采样等处理 ;
③ 三维建模,根据不同的点云特征,建立三维空间数据模型 ;
④ 纹理映射,纹理信息映射到模型上,形成模型的真实纹理。
技术流程如图所示。

激光点云建模的技术流程图
点云建模需要满足两个条件 :
第一, 数据必须是配准的 , 融合为一个整体 ;
第二, 重建的表面与融合的数据拓扑关系一致。
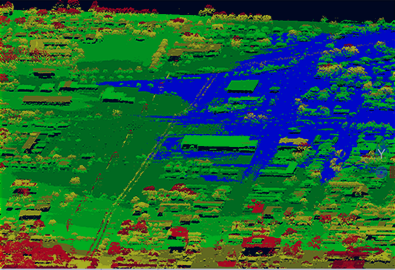
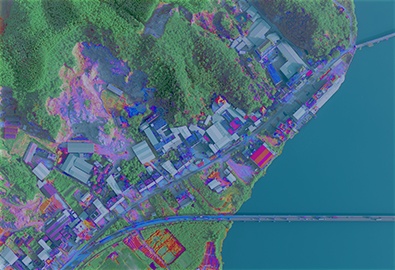
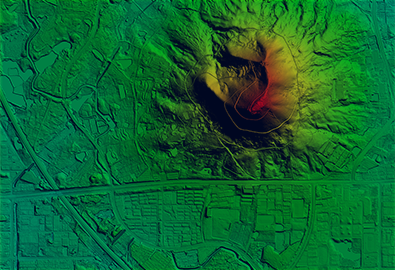
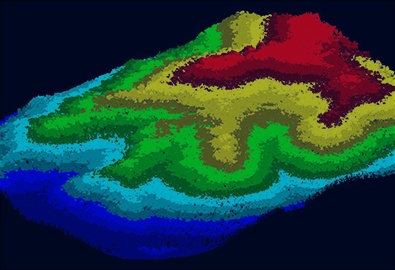
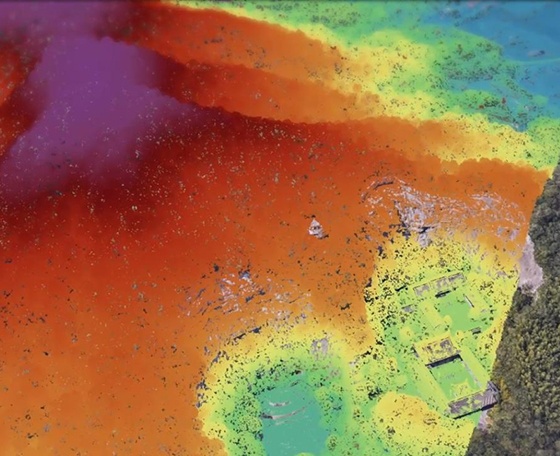
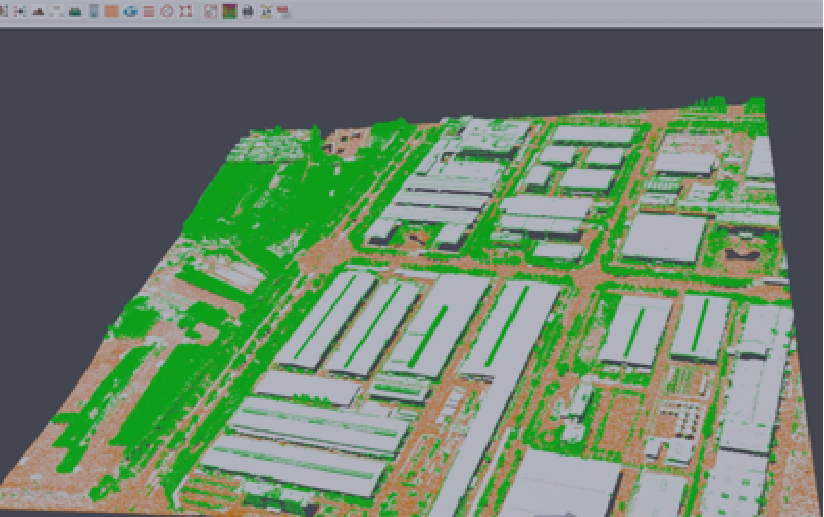
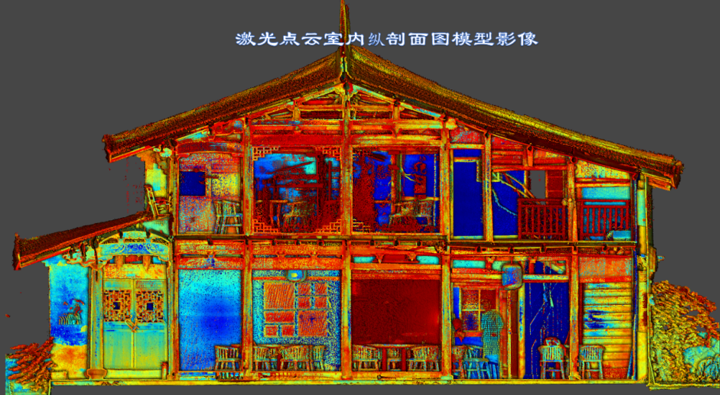
这就要求在进行建模前,需要将点云数据在 StudioClouds 软件中进行处理操作。数据拼接与坐标纠正是数据采集时在相邻区域设置至少三个以上的标靶点,将不同站点不同角度扫描得到的点云数据统一到同一坐标系下,再根据得到的大地坐标,将拼接好的数据转换到大地坐标系下 ;数据去噪是利用软件中去除噪声、去除特征等功能,结合人工分析的方法删除遮挡被测实体的树木、行人等障碍数据 ;重采样是对数据进行优化,通过重采样获得大于 2 mm 任意间距的点云数据,减少数据量,提高效率。处理后的点云数据如图所示。

处理后的点云数据图
二、 激光点云建模与传统建模对比分析
1、数据采集对比
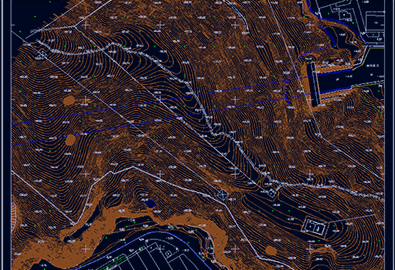
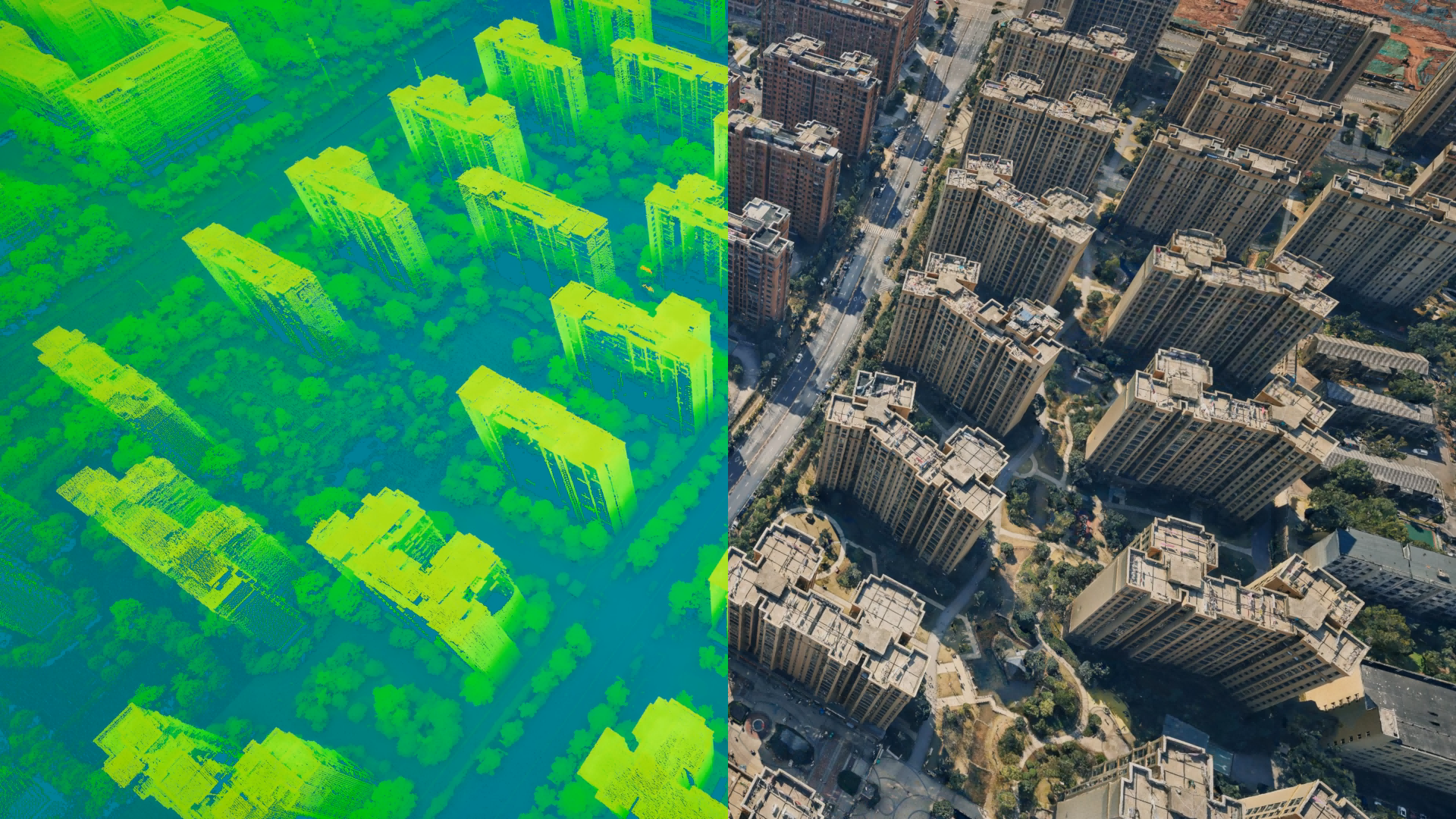
传统获取数据方法是通过外业测量和资料收集, 获取空间实体的CAD 地形图、模型照片等数据。三维激光扫描系统通过记录激光脉冲从发射到接收回波之间的时间差得到实体与扫描仪中心的距离。编码器通过测量脉冲的角度来获取被测物体的三维坐标,获取实体表面完整的点云数据和纹理信息,包含被测物体空间尺寸和反射率信息,同时其内置的数码相机也相应地采集到被测物体的照片,获取的数据真实、可靠。本次对比实验为了更好地突出三维激光扫描仪获取数据的优势,分别采用 Reigl三维激光扫描仪和传统的全站仪对研究区域进行数据采集。
结果显示, 采用 Reigl三维激光扫描仪和StudioClouds 系统控制软件进行扫描,3 个外业测量人员用了 1 d 的时间,通过设置 32 个站点就完整地扫描了奥特莱斯广场上共 11 座建筑,获取的有效数据点达4 千多万。同样的区域,通过传统的全站仪测量需要 6 个人花费 3 d 的时间才能完成,数据获取的能力有限, 外业工作量大。因此,利用三维激光扫描仪可以省时省力并获取丰富精确的数据。
2、 建模方法及效果对比
基于 3DMax,构建地形、地貌模型,一般利用软件的功能模块由等高线和高程点生成 DEM。构建建筑物模型,根据得到的地形图数据构筑建筑物的几何轮廓,在 3DMax 中,以实地测量的建筑物长宽高数据为基础,按照实体轮廓拉伸成具有高度的实体模型,生成的实体模型。构建环境景观和其他地物模型一般通过纹理贴图或直接使用三维模型库中模型的方法来实现。但是通过建模的过程和最后模型的呈现可见,3DMax 建模方式单一,获取的数据离散,失去了很多细部特征,几何信息不准确。特别是对复杂实体建模时不能很好地表现建筑的细节特征。
激光点云建模的方法有两种 :
① 点云数据表面模型制作 , 通过构造三角网格逼近扫描物体表面来构建实体的三维模型。
②几何模型制作 , 通过分割点云数据来提取实体的几何轮廓从而进行模型重建。
由于激光扫描仪采集的数据是离散的,需要把点云分类,采用的是数据滤波分类与点云数据与影像数据融合相结合的方法。对于不同的实体类型,应参考点云数据的特点及建模需求采用相应的建模方法,主要有:
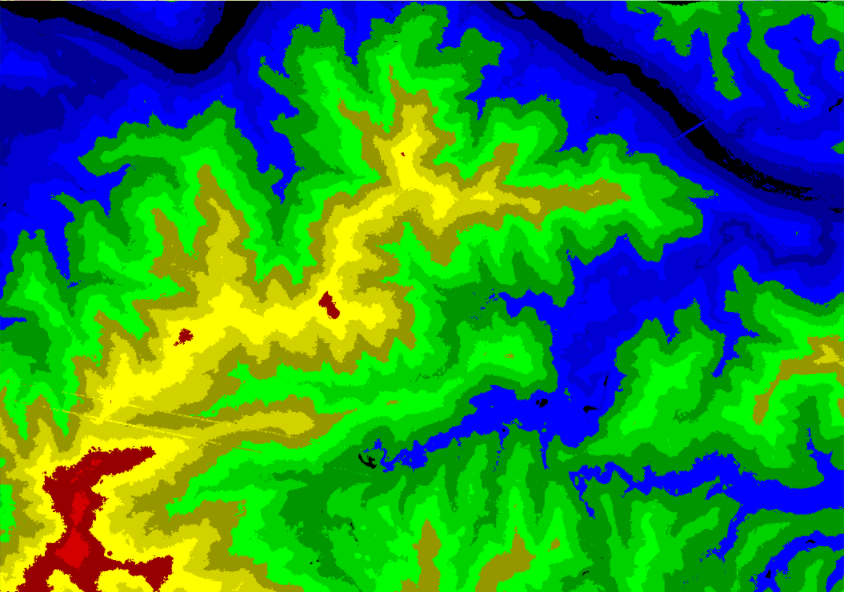
1)地形模型建模。采用投影后构建平面三角网的方法,即将点云数据投影到平面坐标上,利用 X、Y 坐标构建二维三角网,然后再给各点赋 Z 值,从而构建数字高程模型DEM 。
2)规则建筑物建模。规则建筑物一般由连续的扫描点云数据构成,采用几何模型制作方法建模。对点云数据进行分割和曲面拟合,采用人机交互的方式来提取特征轮廓线绘制成实体的几何线框图,进而构建模型,进行纹理贴图。
3)不规则的复杂物体和构筑物建模。这类空间模型表面结构复杂且精度要求比较高,表面是任意的。
4)对于其他地物(如电杆、邮筒、花圃花坛等),这些实体几何形状比较复杂,一般只需要作为一种符号表示其位置即可,因此可根据实际需要,采用建模软件三维模型库中的单体模型和人工特征提取轮廓线建模相结合的办法。
激光点云建模针对不同的场景采用相应的方法,成果表现形式多样,在建模效率、模型精度、实现的可能性和可靠性上都高于 3DMax 建模方法。
下面表格为基于 3DMax 建模与基于激光点云建模的各项指标比较,相对于传统的建模方法,激光点云的建模具有很大的优越性。特别是三维激光扫描仪能够采集到传统测量方法难以获得的不规则建筑物角点,对一些细微特征的描述比较精细,因此激光点云建模方法在结构复杂、大规模建筑物建模中具有更大的应用价值。
激光点云建模技术与 3DMax 建模技术比较表 :
|
建模指标 |
3DMax 建模 |
激光点云建模 |
|
数据获取方式 |
以全站仪为主的单点测量,获取数据能力有限 |
三维激光扫描技术全面扫描,可获取完整数据 |
|
数据获取类型 |
建模实体的轮廓数据、纹理信息 |
建模实体的三维坐标、反射率和纹理信息 |
|
建模方式 |
方 法单一 |
方法 多样,实现的可能性高 |
|
模型精确程度 |
一般,不适合复杂实体的建模 |
精确,成果表现形式多样 |
|
工作量 |
数据采集和建模工作量 都很大、周期长 |
数据采集和建模工作量 较小,在处理海量点云 数据时工作量较大 |
综上所述,主要从数据获取手段和建模方式两方面对以3DMax 为代表的传统建模和激光点云建模方法进行实例比较,结果表明,利用三维激光扫描系统采集的点云适合于构建复杂模型,可以有效地建立完整的模型, 弥补了传统建模方法的不足。但是,激光点云建模方法也存在着一些问题:在数据采集方面,原始数据冗余; 数据处理方面,如果受外界干扰过多会产生大量噪声点,增加了处理工作量等。如何在实际应用中改善这些问题,是需要深入研究的内容。
版权声明:文章来源于网络,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。
猜你喜欢:
倾斜摄影技术在三维城市建模中的作用
探讨激光点云数据的三维建模方法

机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布不均匀的离散点云数据,如何对这些数据进行滤波是当前国内外研究的热点,现有滤波算法大多都是基于...
公司具备PB级处理能力,通过自主研发了P3C、ImgTools、CloudTools等软件,将海量多源数...

南京师范大学随园校区承载着厚重悠远的百年文脉,浸润着“东方最美校园”的灵秀之气。...

飞燕遥感承接了近万平方公里的点云及影像数据采集的新能源测图项目并顺利验收。项目通...

近日,湖北省经信厅发布《2022年度湖北省创新产品应用示范推荐目录》(以下简称《目录...
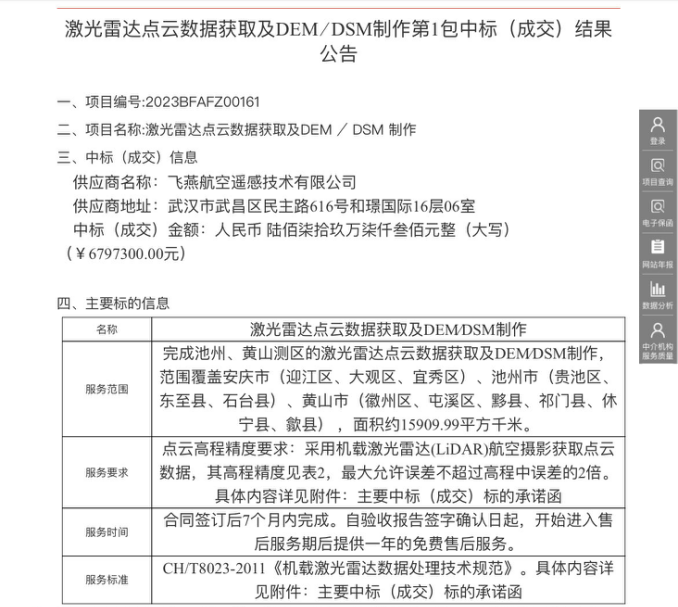
近日,飞燕遥感喜中2023年安徽省机载激光雷达点云项目,中标金额6,797,300元。 此次...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019-2025 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English