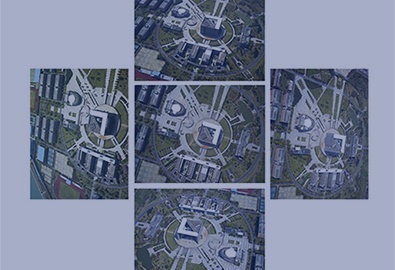
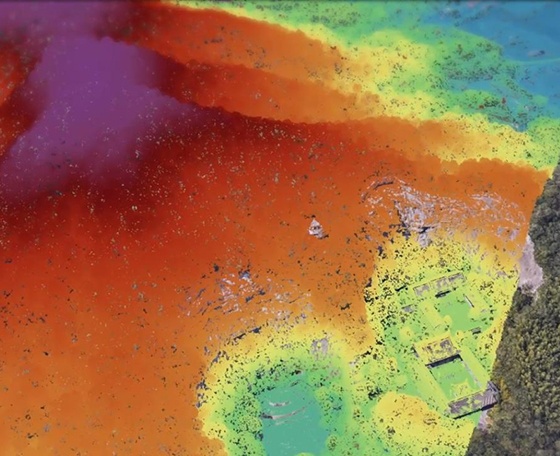
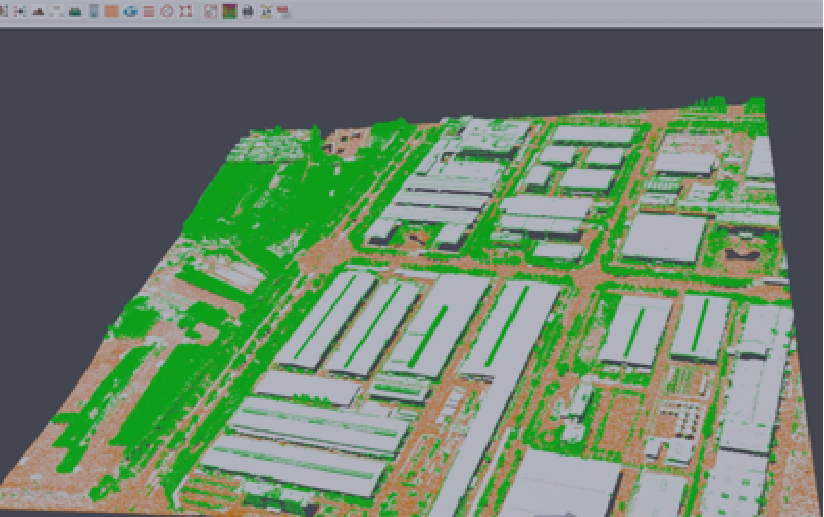
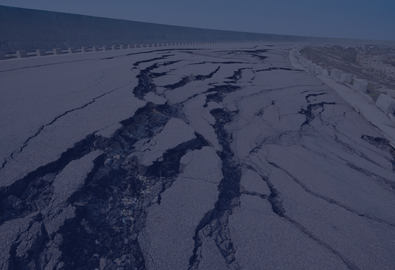
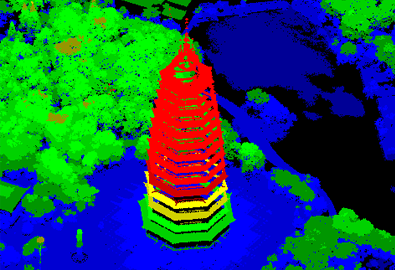
机载激光雷达技术获取点云数据时,由于扫描视场角和航高的限制,通常需要设计多条航线进行航摄。这些航线之间需要设置一定的旁向重叠度,从而保证航摄数据采集能够覆盖整个测区。由于这些旁向重叠区域会被两个条带的点云覆盖,使得密度大于其他区域,在重叠区域形成了航摄数据冗余。航摄数据冗余会导致激光点云空间分布的非均匀,同时LiDAR数据在条带边缘的点云数据精度较差,去除冗余数据是LiDAR数据处理后期及产品生产中的重要步骤。
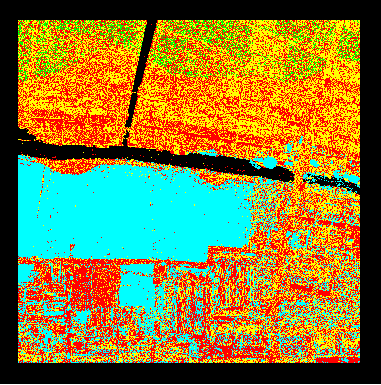
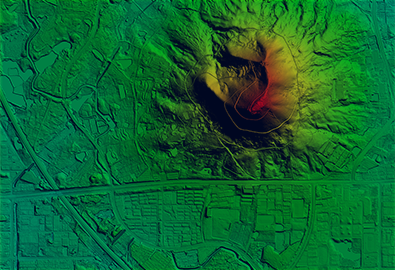
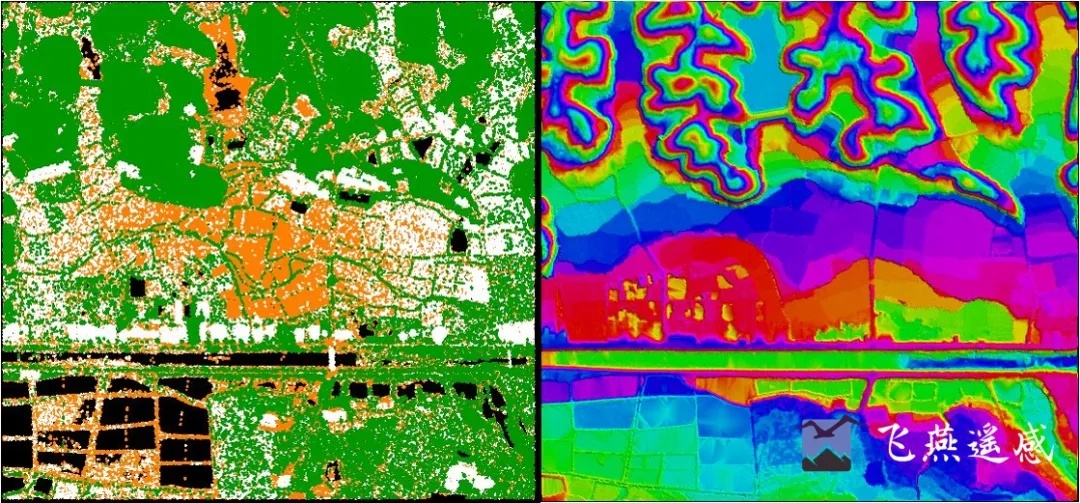
点云预处理数据消除冗余前
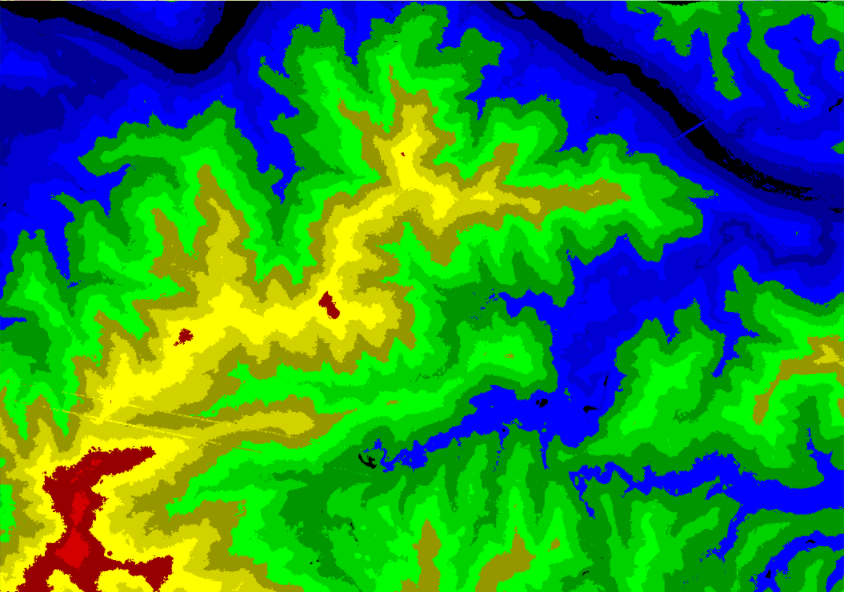
通常激光点的测量误差与激光扫描角成正比,越靠近条带边缘的点云误差越大,针对机载激光雷达航带重叠区域的冗余部分,运用Terrasolid软件的cut-overlap功能,根据完整的航线信息,以点云精度随扫描角的增加而减小为理论依据,从而去除航带重叠区域中航线扫描角较大的点云,保留靠近行带中心质量较高的点,能有效剔除除航带间的航摄数据冗余。

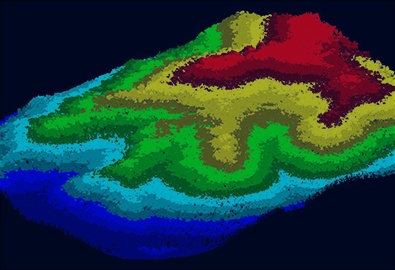
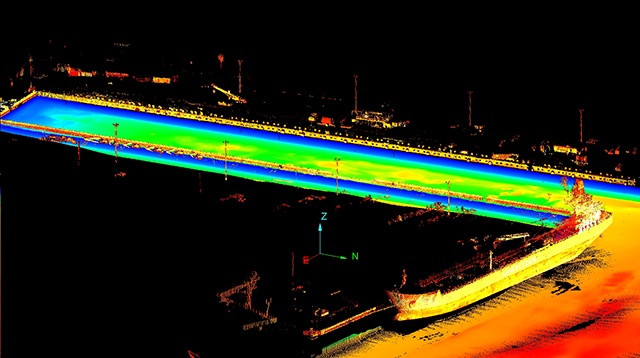
点云预处理数据消除冗余后
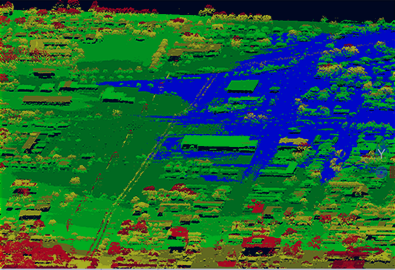
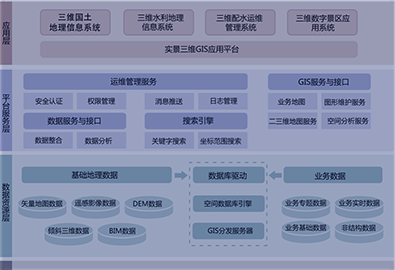
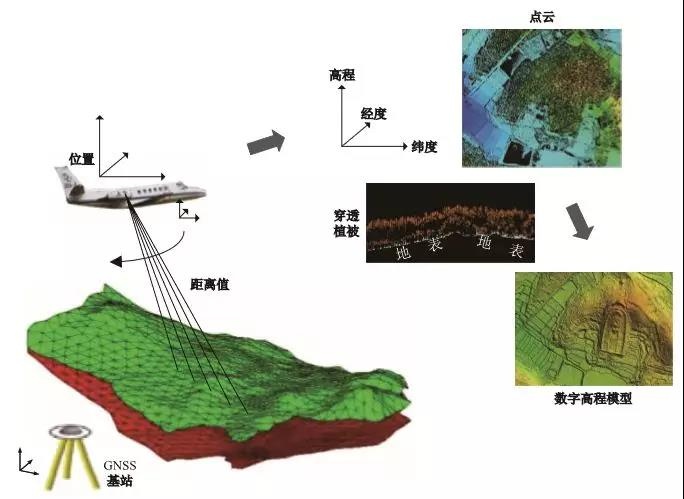
机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布不均匀的离散点云数据,如何对这些数据进行滤波是当前国内外研究的热点,现有滤波算法大多都是基于...
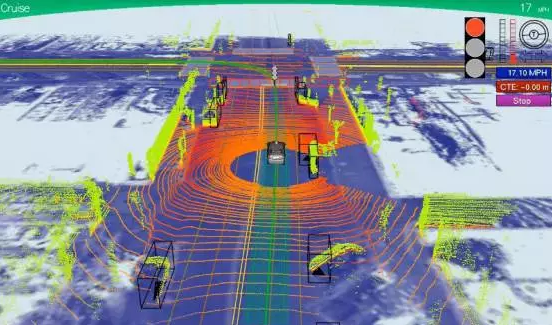
LIDAR点云数据的数据组织方式,提出了采用矩形规则格网形式来表达LIDAR点云数据,将LIDA...
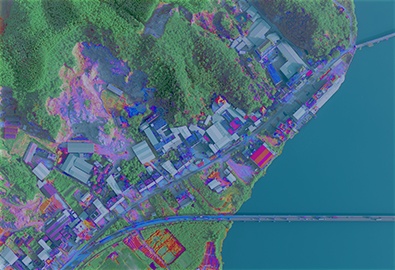
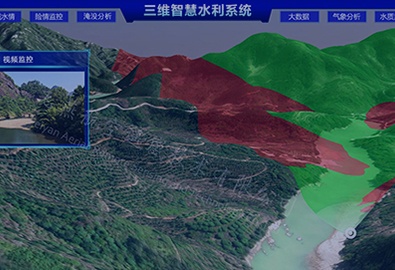
随着万木愈加葱茏,林业资源调查工作却犯了难,人力物力缺乏导致调查力度不够,林业资...
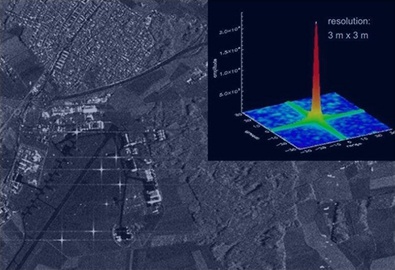
机载LiDAR技术是激光测距技术、高精度动态载体姿态测量技术和高精度动态GPS差分定位技...
LiDAR,是激光探测及测距系统的简称,是一种采用激光对地面物体的高度进行量测的方式。...
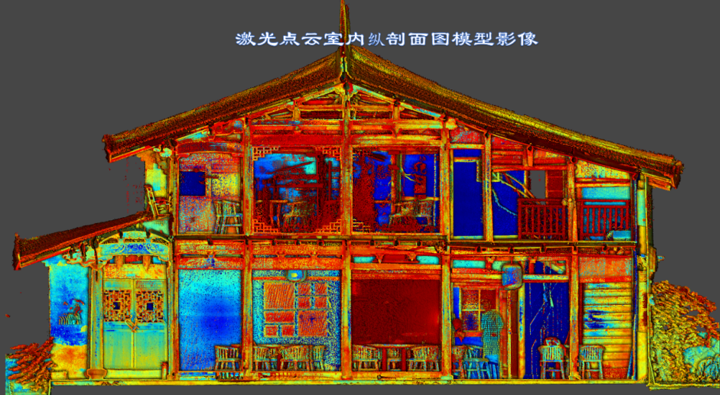
数千年的人类文明史,给我们留下了大量的历史遗迹或遗物,如何及时发现并有效保护这...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019-2025 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English