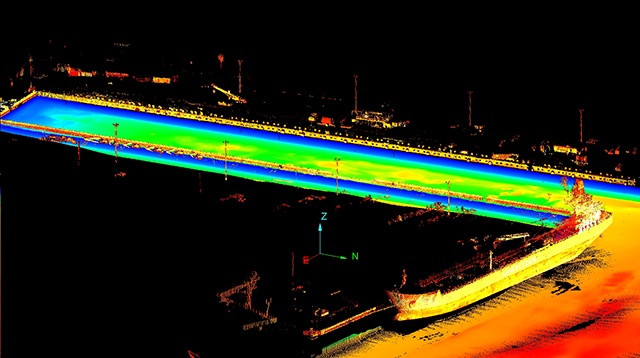
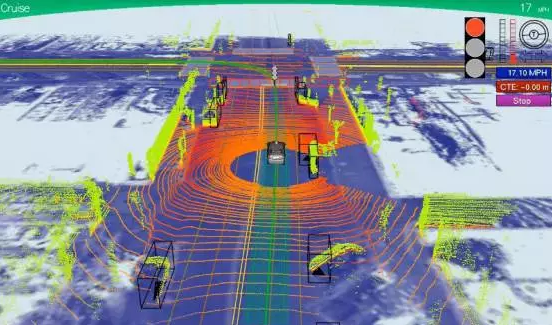
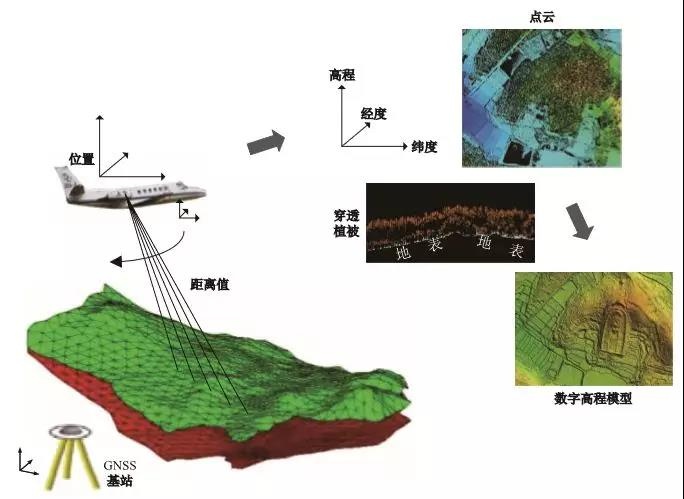
机载LIDAR是最近30年才发展起来的一种高新技术,机载激光雷达技术是激光测距技术、计算机技术、高精度动态载体姿态测量技术(INS)和高精度动态GPS差分定位技术迅速发展的集中体现。激光测距技术在传统的常规测量中就扮演着非常重要的角色,从最初的有反射棱镜的测距仪系统发展到如今无合作目标的激光测距系统;GPS定位技术的出现彻底解决了海陆空的定位问题:INS和GPS的集成为确定高动态载体的姿态成为可能。以上几种技术的成熟运用及相关技术的发展为整个系统的集成奠定了技术基础,机载激光雷达实际上已经代表了对地观测领域一个新的发展方向。整个系统比较复杂,就数据获取的方式来讲更像大地测量系统(通过测边、测角进行点的定位),就数据后处理的方式来讲却更像摄影测量系统,包括地物的提取,建筑物三维重建等。
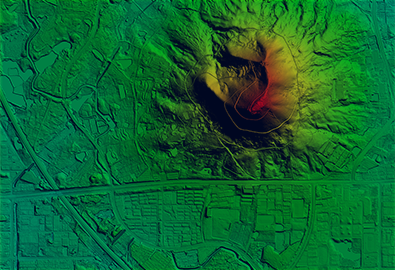
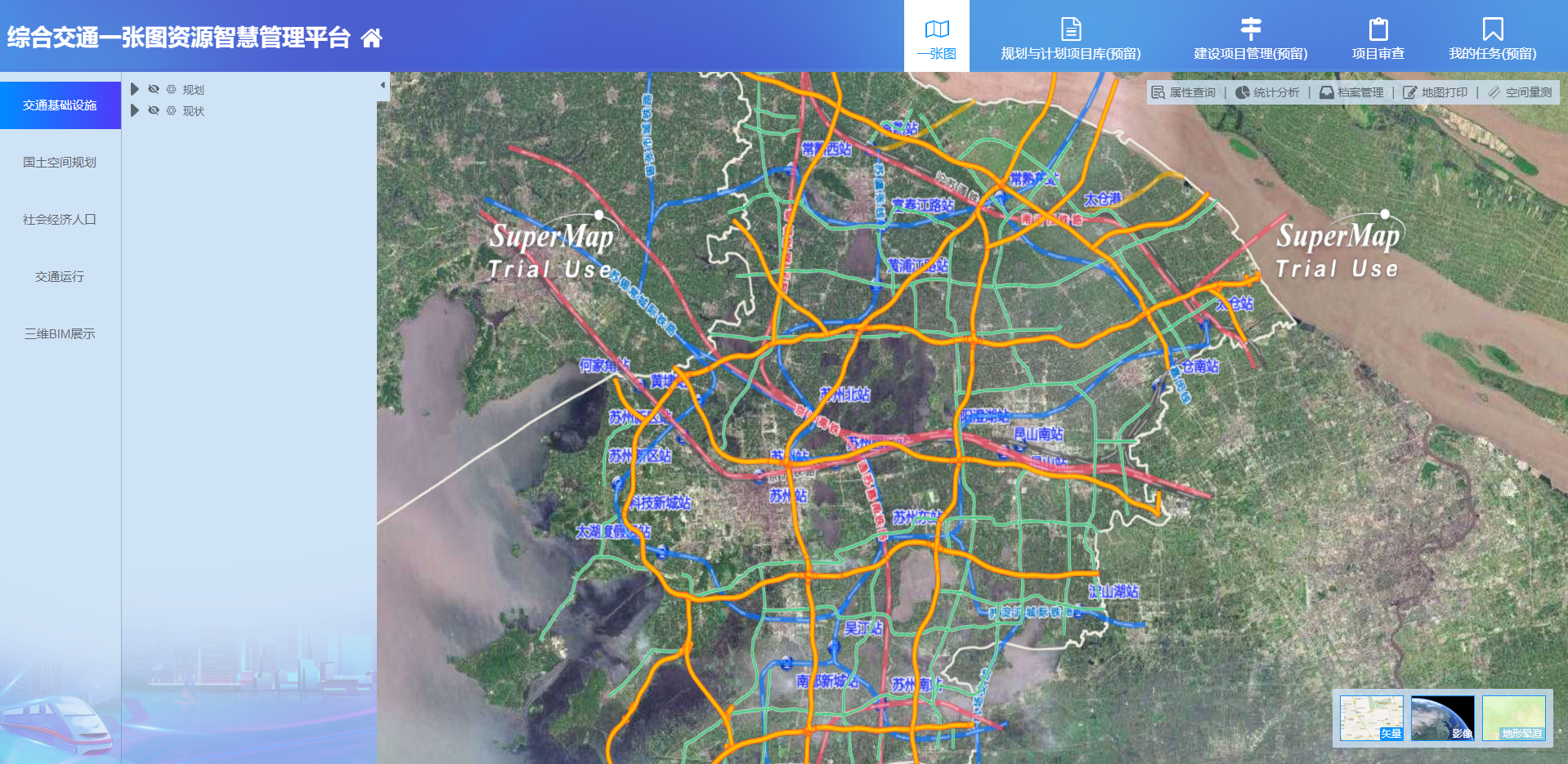
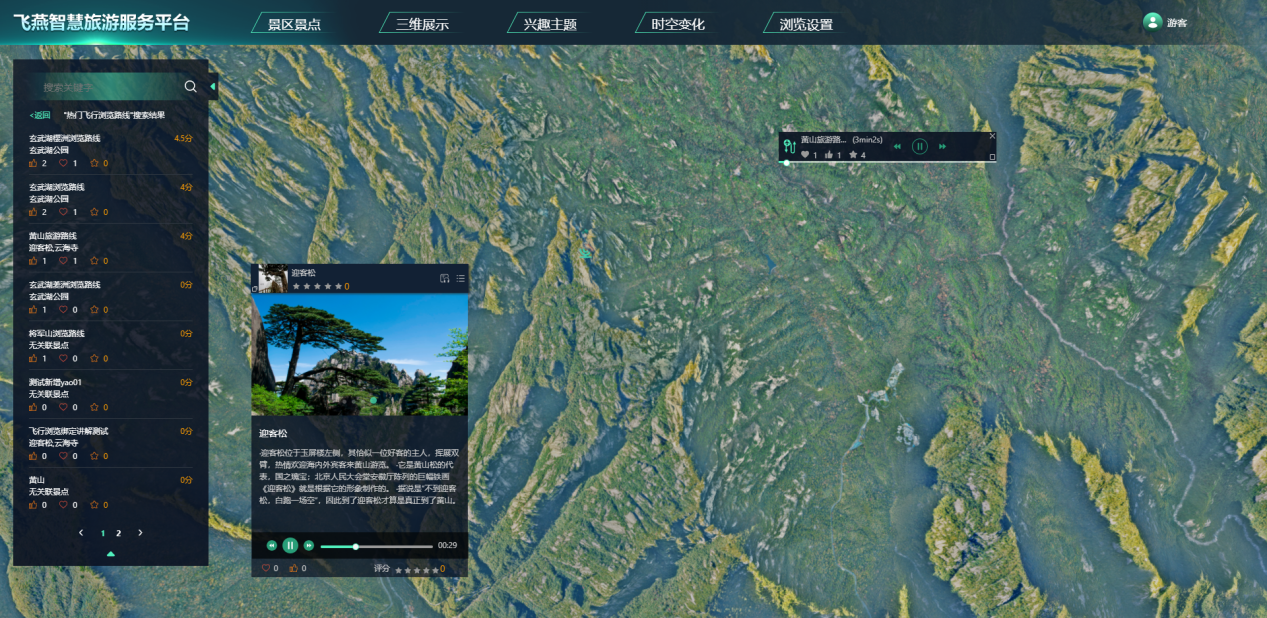
机载激光雷达目前主要用于快速获取大面积三维地形数据,快速生成DEM等数字产品,特别是用于测绘森林覆盖区域和山区的真实地形图;将机载激光雷达技术作为一种新的技术手段应用于快速生成城市地区的数字地面模型(DTM),进行地物自动提取,由数字地面模型(DTM)生成数字高程模型(DEM),并进一步建立三维城市模型,是当前在该领域的一个研究热点。
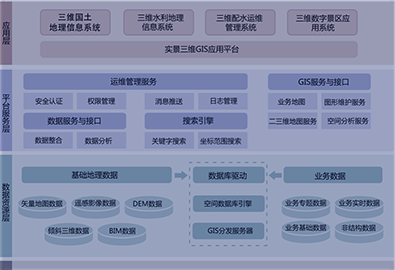
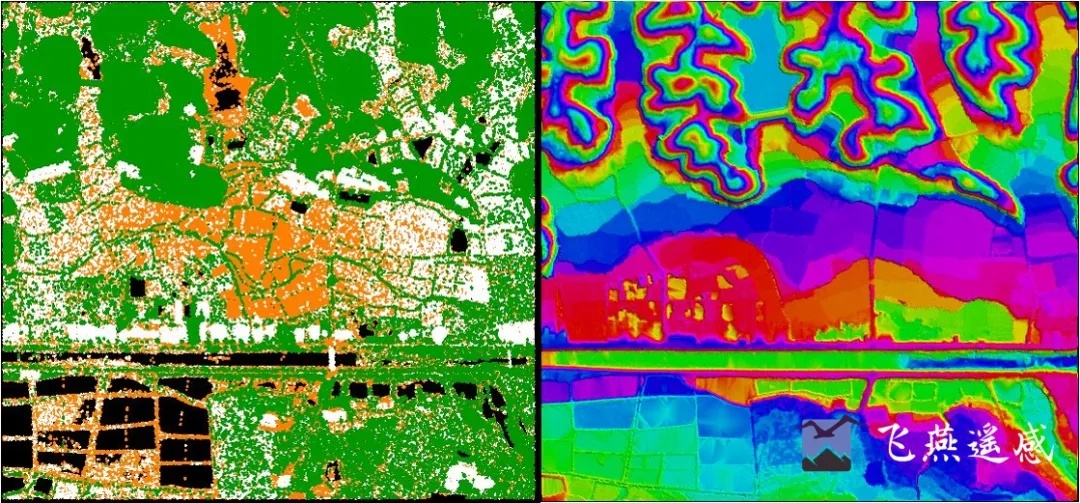
和遥感影像的融合方法.jpg")
1、融合LIDAR和遥感影像进行分类方法的提出
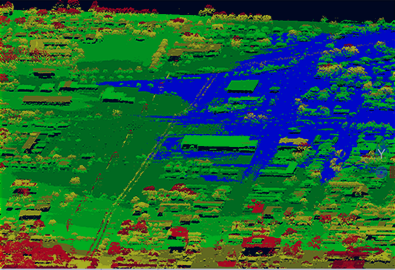
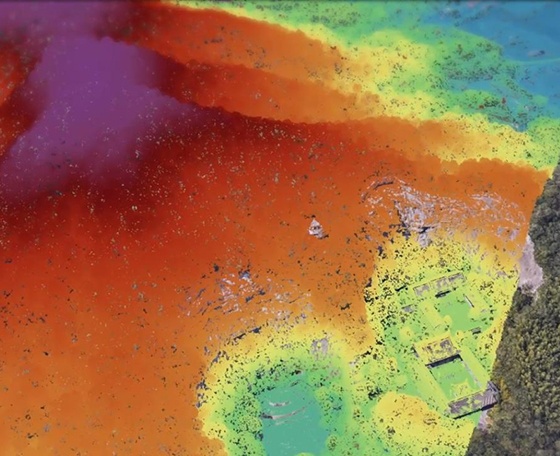
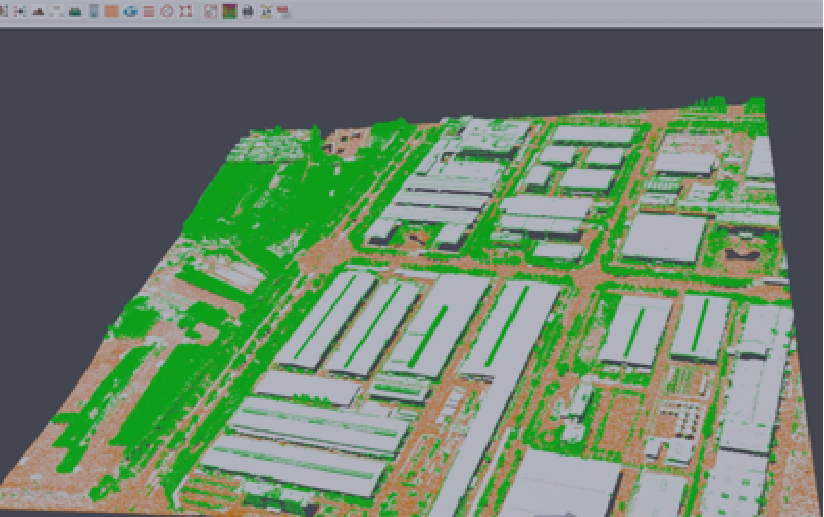
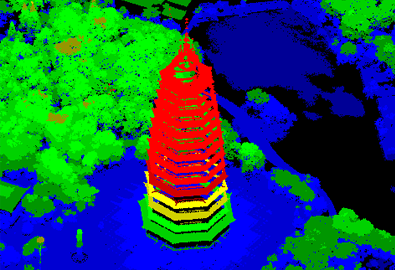
目前人们研究出了一系列激光雷达数据的分类算法。比如,(1)仅仅用LIDAR数据单独进行城市表面地物的提取,例如将LIDAR点云数据生成DSM,借助统计直方图分析可确定阈值的大小,再利用面积、高程、梯度阈值来进行建筑物提取;利用激光脉冲两次回波的高差变化,将首次回波获得的高程减去尾次回波所获得的高程,在空旷地带和房屋等表面规则的地物,两者的高程差几乎为零,而在植被覆盖区,特别是树林地带,高程差不为零,利用这一特性,可将植被和非植被点区分开来。(2)结合LIDAR数据和等高线、电子地图等数据源进行地物提取。例如Palme将GIS数据和LIDAR点云数据结合在一起,以GIS数据为基础对LIDAR点云数据进行分析和归类,进而提取出三维建筑物。它首先将GIS数据和LIDAR点云数据生成的DSM进行重合,然后在GIS数据中标出建筑物的位置,在DSM中对应的找到其中的建筑物,最终获得完整的三维建筑物模型。但对于一些不适合人工作业的地区,数据不易获得,因此该方法也存在一定的局限性。(3)融合激光回波信号强度和激光脚点高程进行分类。机载LIDAR系统不仅能提供数据点的高程信息,而且越来越多的系统可以提供激光回波信号的强度信息。激光脉冲打到相同的物质表面时,其回波信号的强度较为接近,每种物质对激光信号的反射特性是不一样的,当树和房屋靠近时,用常规的基于高程变化的数据很难将两者分开,而利用强度信息可以将它们分开。首先对不同介质激光回波信号强度进行标定,可以先利用内插后的高程数据图像识别出房屋和树等;然后利用激光回波信号的强度数据形成的图像识别出道路和草地等。
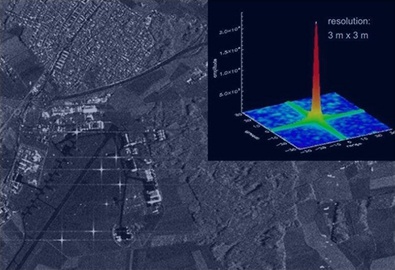
近年来,随着遥感技术的发展,QuickBird、IKONOS、SPOT5等高分辨率遥感影像的出现大大提高了遥感技术应用的发展。高空间、高光谱分辨率的提高带来了单位空间内像元数量的增加,提供了更为丰富的地物信息。同时,高分辨率的航空影像记录了连续波谱信息,包含了空间结构、地物边界、色彩属性等判读地物的重要信息。现在,有的数字航摄仪地面采样率可达到厘米级,能够分辨地物微小差别。激光雷达数据虽然对描述地物三维空间结构的优势明显,但其每平方米几个点的激光点密度以及分米级的光斑分辨率(光斑直径)对于精确描述地物边界还存在误差。尤其是不规则房屋边缘存在高度相似植被的情况下,容易造成错分和误判,需要借助正射影像进行辅助判读。此外,快速建立建筑物三维模型时房屋边界探测也需要航空影像数据加以判读。实验表明,如果不融合其他数据源(如影像数据、多光谱数据等),而单独利用LIDAR数据进行地物的分类和识别等自动化、智能化的处理具有很大的难度。基于这一现状,我们试图将LIDAR与遥感影像加以融合,综合利用LIDAR数据的位置、高程信息以及遥感影像的光谱、纹理信息,对地物加以分类研究。在进行数据融合之前,需要对两种数据进行预处理。
2、数据预处理
LIDAR点云数据表示的是离散三维空间信息,没有规律性,这种数据形式对数据处理和表达带来困难,更不利于三维信息的提取。因此,需要对这些原始数据进行一些预处理,转换为容易表达和处理的数据组织形式。合适的数据组织形式,能为数据的处理和表达带来很大的便利,否则不仅会损失部分信息,可能为信息提取带来某种更大的困难。
2.1LIDAR点云数据的表达形式
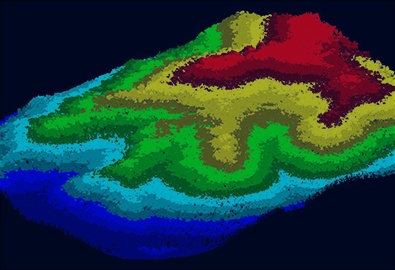
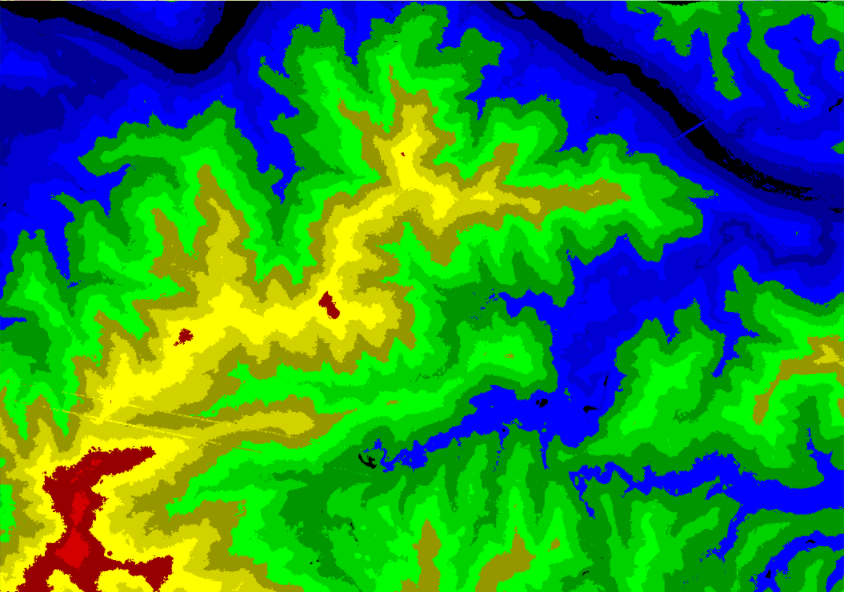
原始的LIDAR点云数据就是若干个地面或者地物点的精确三维坐标信息。对原始LIDAR点云数据选择一种合适的表达方式,对数据管理和处理尤为重要,常用的数据表达方式有规则格网、不规则三角网、分块曲面法等多种方法其中,分块曲面法近似数学函数,每块用一种数学函数来表示和描述,这种方法并不利于计算机自动分析和处理。TIN能较好地顾及地貌特征点、线,表示复杂地形表面,缺点是数据量较大,数据结构较复杂,使用与管理也较复杂;不仅要存储每个点的高程,还要存储其平面坐标、节点连接的拓扑关系,三角形及邻接三角形等关系。规则格网表示法通常又有三种形式,正方形、长方形和等边三角。一般来说,规则格网数据便于进行聚类聚合、多层面复合叠置分析、窗口分析及追踪分析等几种基本的分析,这些优点对于点云数据处理提供了很大的便利。而且后面LIDAR点云数据要和影像数据进行匹配,而数字影像的象素分布可以看作是正方形排列,为了使得两者统一,方便处理,LIDAR数据和影像数据的分布采用统一的形式来表达,用矩形规则格网形式来表达LIDAR点云数据是最合适的也是最方便的。在将LIDAR点云数据进行规则格网化的过程中,必须要选择一种适合LIDAR点云数据的内插方法和间距。
2.2LIDAR点云数据的内插方法
内插即在一个由x、y坐标平面构成的二维空间中,由已知若干离散点Pi的高程,估算待内插点的高程值。由于采样的数据点呈离散分布形式,或是数据点虽按格网排列,但格网的密度不能满足使用的要求,这就需要以数据点为基础进行插值运算。常用的数据内插方法有反距离加权插值法(IDW)、自然邻近点插值法(NaN)、Kriging插值法、样条插值法、非线性插值法、线性插值法等等。
2.3遥感影像预处理
遥感影像预处理,包括消除几何畸变以及各种噪声的影响,以提高配准的精度。对航空影像,选择地面控制点进行几何纠正。
3、遥感影像配准
由于机载LIDAR和对应的的遥感影像没有共用一套光学系统,两者没有统一的坐标系统,所以在进行数据融合之前,首先要对两者进行精确的匹配,获得地学编码影像。
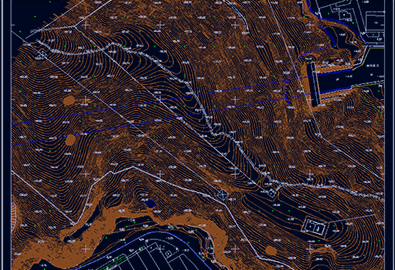
我们对坐标变换采用控制点位法,采用WGS84坐标系(UTM投影),通过测定多组遥感图像上特殊地物的坐标点以及与这些坐标点相对应的DSM图像上的点的坐标,然后将测得的控制点坐标代入坐标系转换多项式方程,求出各项系数,确定坐标系转换方程。由确定的多项式转换方程,以待定的DSM图像上点的坐标为自变量,按逐个点位坐标输入方程,求出相应的坐标,然后按一定的内插方法插值求算出最适宜DSM上点的影像像素值存入DSM上。如此,最终完成整幅图像的配准校正工作。
在寻找控制点时,为了提高配准校正精度,一般应选取DSM和影像上皆清晰的道路,河流的交汇点,拐弯点,同时使采集的控制点均匀分布于整个DSM图像上。实际上,由于判读控制点坐标时难免有误差,为了避免少数对应点的误差而影响方程的求值精度,通常采用多选控制点对,再进行方程的多次拟合分析,排除多次拟合效果差的控制点,留有效果好的控制点。
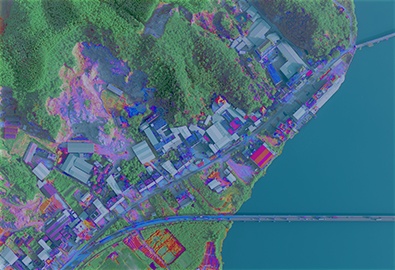
4、影像跟DSM的融合
数据融合最早被应用于军事领域。是一个对多遥感器的图像数据和其他信息的处理过程。着重于把那些在空间或时间上冗余或互补的多源数据,按照一定的法则进行运算处理,获得比任何单一数据更精确更丰富的信息。
图像融合可在三个不同的层次上进行:一是像元(pixel)、二是特征(feature)、三是决策(decision)层。融合的水平依次从低到高。基于不同的融合层次,采用的融合方法也不相同,如像元级的代数法、IHS变换法、小波变换法、主成分变换法,特征级的聚类分析法、加权平均法,决策级的神经网络法等。
4.1HIS融合方法
我们使用的基于像元的图像融合方法,采用HIS彩色技术变换方法,通常用彩色显示器所显示的彩色是由RGB信号的亮度值所确定的。但因RGB彩色坐标系统中R、G、B呈非线性关系.使调整色调的定量操作较为困难。而HIS彩色坐标系统对颜色属性易于识别和量化,色彩的调整(数学变换)方便、灵活,因而往往进行RGB系统――HIS系统的彩色空间变换。所谓HIS彩色变换是指将标准RGB图像有效地分离为代表空间信息的明度(I)和代表波谱信息的色度(H)、饱和度(S)。
4.2融合效果评价
融合图像对于后续的信息提取和改善分类精度都是至关重要的,经融合后的影像纹理特征增强,细节更加突出。用最佳指数因子(optimumindexfactor,简称OIF)来求算信息量的大小。
在数据统计分析的基础上,选择标准差大、相关性小的数据。因为标准差越大,所包含的信息量越大,而波段间的相关系数越小,表明图像信息的冗余度越小。因此Fion越大,则该组合波段的信息量越大。
猜你喜欢:
版权声明:文章来源于网络,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。

机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布不均匀的离散点云数据,如何对这些数据进行滤波是当前国内外研究的热点,现有滤波算法大多都是基于...
LIDAR点云数据的数据组织方式,提出了采用矩形规则格网形式来表达LIDAR点云数据,将LIDA...
随着万木愈加葱茏,林业资源调查工作却犯了难,人力物力缺乏导致调查力度不够,林业资...
机载LiDAR技术是激光测距技术、高精度动态载体姿态测量技术和高精度动态GPS差分定位技...
LiDAR,是激光探测及测距系统的简称,是一种采用激光对地面物体的高度进行量测的方式。...
数千年的人类文明史,给我们留下了大量的历史遗迹或遗物,如何及时发现并有效保护这...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019-2025 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English