1 LIDAR数据处理概述
1.1 LIDAR数据的特点
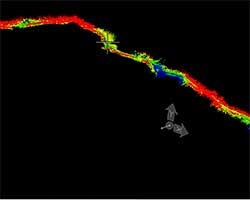
从严格意义上讲,航空激光雷达系统获取的数据包括位置、方位/角度、距离、时间、强度等飞行过程中得到的各类信息。而实际应用中,人们接触和使用的是与具体时间及发射信号波长一一对应的点坐标及对应的强度等。作为一种非成像技术,航空激光雷达数据在内容、形式等方面具有很多自身的特点。
第一,从内容上讲,航空激光雷达数据是分布于对象表面的一系列三维点坐标。值得注意的是,多次回波数据得到的点坐标可能对应着不同的表面,首、末次信号分别对应树冠和地面,这种特性在某些场合可以发挥重要作用。例如,在相邻扫描带上植被或其他具有不规则形状的物体可能会具有不同的高度,若用它们进行匹配可能会产生粗差,使用末次回波信号就可以避免匹配过程中不可预测的粗差问题。与记录反射/发射能量的强度数据相比,航空激光雷达数据在提取空间信息上更加便捷。
第二,激光雷达数据在形式上呈离散分布。这里“离散”是指数据点的位置、间隔等在三维空间中的不规则分布,即数据分布无规律性。
第三,数据形式的另一个特点是扫描带中数据分布不均匀不同位置的点云密度不同,造成这种情况的主要原因是激光扫描仪所采用的扫描方式。激光扫描仪所采用的扫描方式有圆锥扫描,线扫描和光纤扫描。
不考虑地形起伏的影响,在圆锥扫描方式中,扫描带两侧数据密度大,中间部分稀;线扫描方式的情况类似;在光纤扫描方式中,扫描线方向上的数据密度大于垂直扫描线方向上的。其他原因还包括飞行速度、扫描仪与地形/地物的相对位置/方向及航高等。例如,对建筑物的倾斜屋顶而言,朝向扫描仪方向的屋顶会比背向扫描仪方向的屋顶反射更多的信号,在数据密度较大时两个屋顶平面上数据密度就会表现出差异。
第四,尽管目标点的三维坐标是航空激光雷达的主要数据形式,但其数据类型并不局限于此。强度信号是另一个有用的信息源,它反映了地表物体对激光信号的响应。由于一些技术上的原因,还没有得到多少实际应用。目前有用强度信号作为树种分类的依据事例。
1.2 LIDAR数据处理
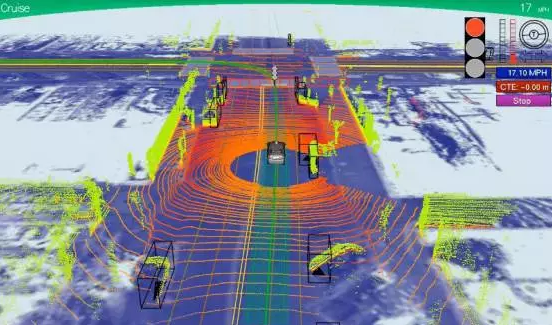
LIDAR数据处理包括原始数据预处理和点云数据后处理两个阶段。原始数据预处理阶段主要包括滤除雷达噪声,对记录的原始信号、时间参数、距离参数、GPS和INS数据进行归化处理、坐标变换,以得到地面目标的三维(x,y,z)点云坐标数据。坐标的格式可以根据用户的要求定义,即可以得到不同的数据格式文件。点云数据后处理就是对得到的地面目标的三维点云坐标数据进行分离处理。具体地说,由于激光雷达点云数据分布在不同的目标上,后处理就是将落在地形表面上的点(即所谓的地面点)与那些非地形表面上的点进行有效而准确的分离。只有高精度及准确而可靠地分离不同信息后,才可能有效地将这些数据用于不同的目的,例如:得到DEM数据、测量树的高度、获取城市的三维模型等。对三维点云坐标数据进行有效的后处理是激光遥感系统最主要的组成部分。
尽管LIDAR技术在获取地面点三维坐标方面具有效率高、全覆盖、三维测量等优良的技术特性,但是其数据量的庞大、复杂、无规律等特点始终困扰着后期的数据处理。
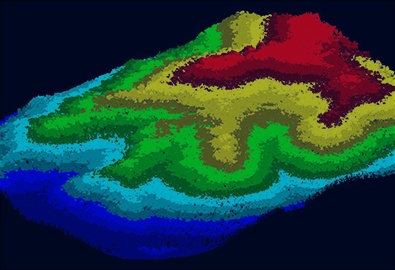
2 规则格网重采样生成数字表面模型(DSM)
在建立了规则地址格网检索算法的基础上,本文利用逐点内插法中的距离加权平均法来生成数字表面模型(DSM),具体步骤如下:
(1)确定内插点所在的格网单元。
由测区内所有激光采样点X、Y坐标的最大、最小值可以得到测区的范围,再依据采样间隔就可以计算出DSM格网的大小。设x方向采样间隔为,方向采样间隔为,测区起点坐标,则格网坐标对应的激光内插点坐标为:
(2)规则地址格网检索邻域内的点。
利用距离加权平均法进行内插计算,需要选取与插值点距离最近的若干个点来参加计算。最简单的方法就是计算内插点与周围采样点的距离,然后从中选出与内插点距离最近的若干点。这种方法计算量大,影响到插值速度。为解决这一问题,可选用一定的邻域搜索区域,根据距离加权平均法内插数学模型对采样点数量的要求,不断调整搜索范围,直到满足要求为止,不应该少于4个点。
在建立了规则地址格网的基础上,就可以利用矩形检索函数搜索邻域正方形区域内的采样点,设所建立的规则地址格网的起点坐标为,搜索半径为,则矩形检索函数的参数设置为:
设置了函数参数,就可以利用矩形检索函数来搜索内插点正方形邻域内的采样点,若搜索的采样点数量不满足要求,则扩大搜索半径,直到满足要求为止。
(3)权值的计算。
由于地形的自相关性,较近的采样点对内插点的影响要大一些,因此常常用内插点和采样点之间的距离来刻画采样点对内插点的贡献程度,即距离越近,权值越大,反之越小。设当前内插点为,采样点为,为内插点与采样点之间的距离,定义采样点的权为:
称为反距离权。式中指数,而且实验证明,当时,导致曲面在数据点附近相对比较平直,而在两个数据点之间一个很小的区域内有很大的梯度,当时,导致曲面相对平缓,没有起伏,当时,不但容易计算,也比较符合实际地形变化规律,因此,实际应用中常常取。
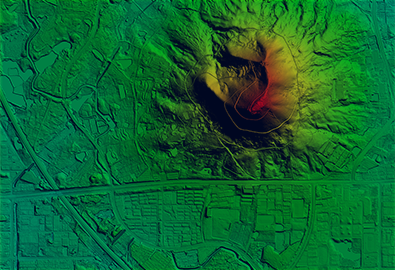
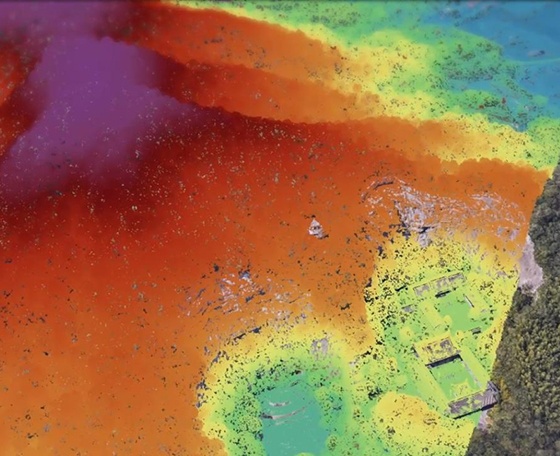
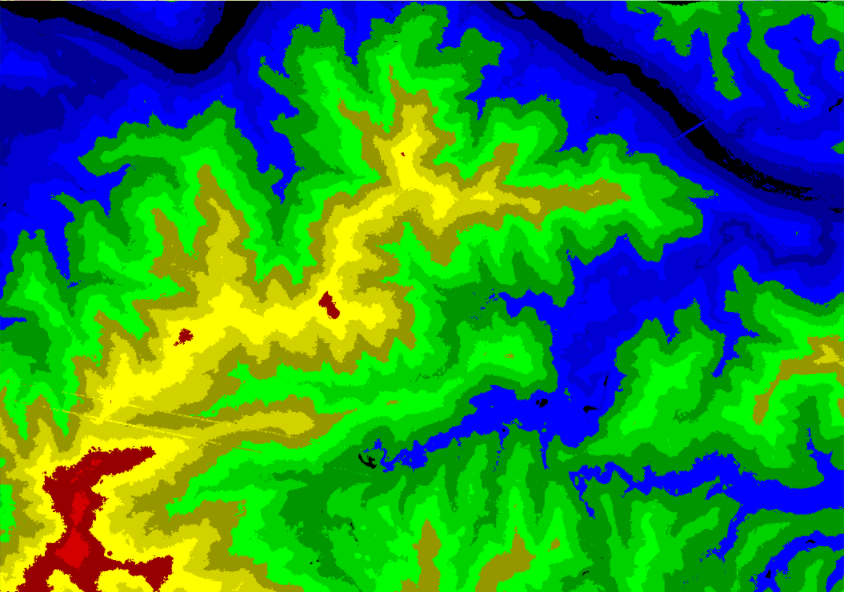
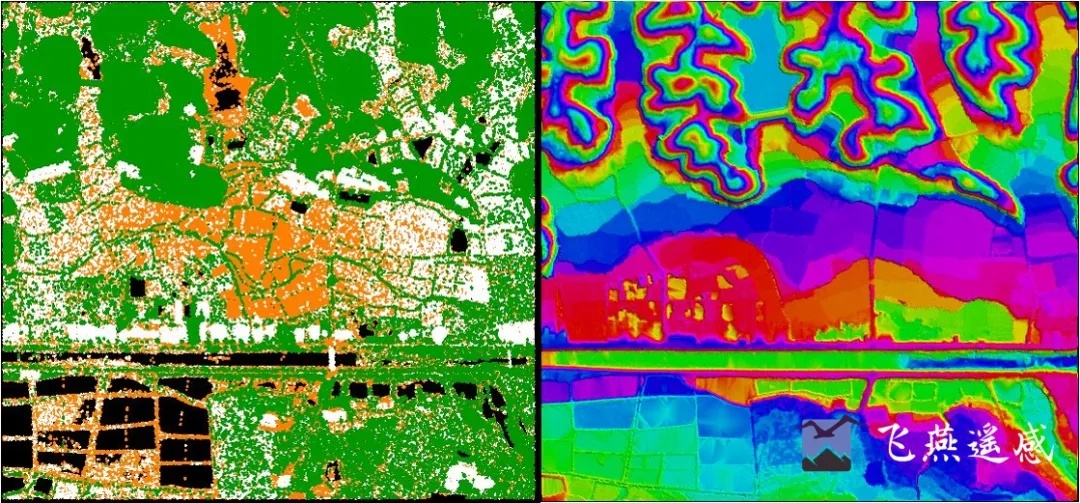
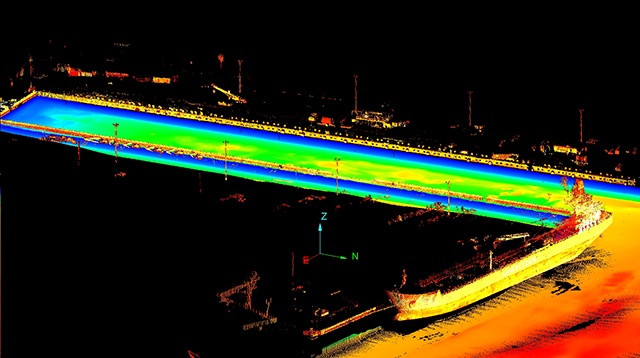
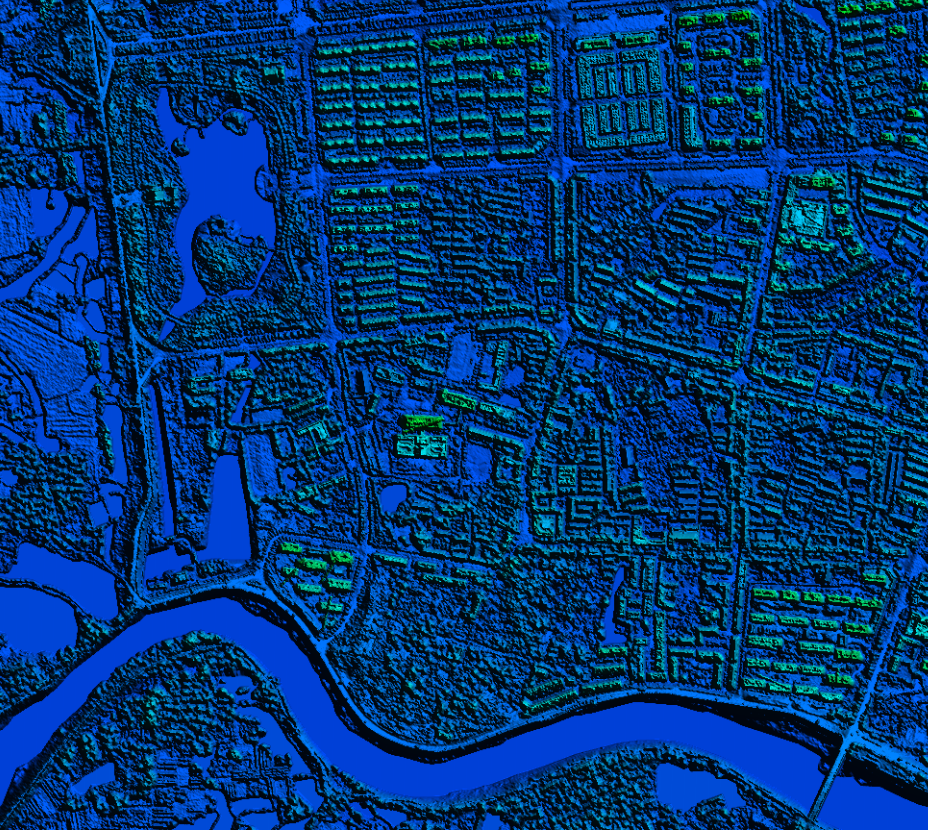
3 灰度量化生成DSM深度影像
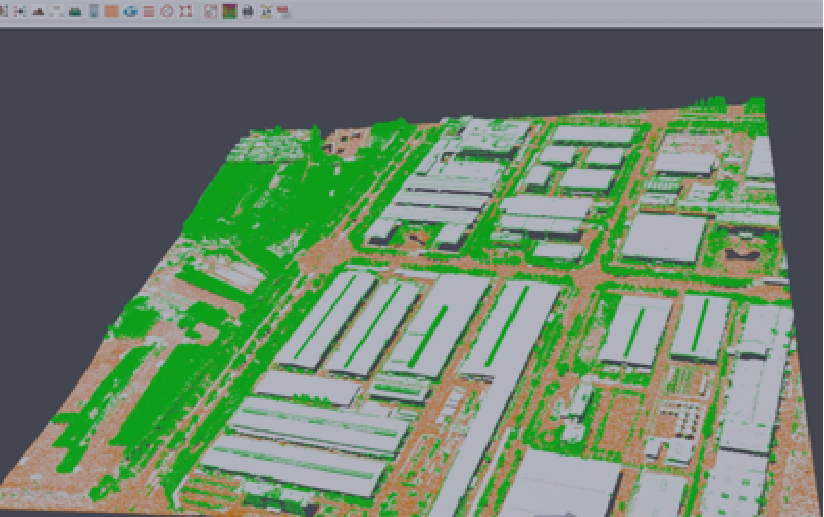
为了直观地表示出LIDAR数据的内容信息,将由离散LIDAR点云数据规则格网重采样生成的数字表面模型(DSM)按照高程进行灰度量化,得到同灰度图像一样的DSM深度影像。这就为后续的基于数字图像处理技术的DSM深度影像处理做好了准备。具体做法是:搜索DSM中所有的LIDAR数据点,得到高程最大值和最小值,对高程进行量化,得到每一点的像素灰度值;同时将DSM三维点坐标中的X、Y坐标转化为DSM深度影像的二维横、纵坐标、,一个坐标点对应一个像素点,就生成了同DSM格网大小相同的DSM深度影像。
其中:
为灰度值,为DSM中LIDAR点的高程值。获得了同灰度图像一样的DSM深度影像后,一般可以从视觉上直接判断出地形的高低、形状等,一般也可以判断出建筑物、道路、水塘、沟渠、河流、桥等地物要素。与灰度图像相比,由航空LIDAR点云数据生成的城市地区DSM深度影像有其独特的特点。表现在:
(1)影像的灰度值和DSM中LIDAR数据的高程值成线性关系,高程值越高对应的像素灰度值就越高,反之,则越低。
(2)在平坦城区,影像上地面部分的灰度值变化不大,且像素的灰度值低于建筑物部分。
(3)由于LIDAR光束在较高建筑物边缘常和墙面相切,导致建筑物边缘数据不准确,因此在灰度影像上建筑物边缘常呈锯齿状。
DSM深度影像其独特的特点为引入数字图像处理的方法提取建筑物奠定了基础。
猜你喜欢:
版权声明:文章来源于网络,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。


过去,森林资源调查以人工地面调查为主,不仅耗时久、效率低,数据精度也不高。现在,一架搭载机载激光雷达的小型飞机,飞行1个小时可采集300平方公里的森林数据。高效率的技术手段使...
机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布...
LIDAR点云数据的数据组织方式,提出了采用矩形规则格网形式来表达LIDAR点云数据,将LIDA...
公司具备PB级处理能力,通过自主研发了P3C、ImgTools、CloudTools等软件,将海量多源数...
2021年,飞燕遥感凭借丰富的航摄经验与百人数据处理团队,承接了安徽省基础地理信息数...
近日,飞燕遥感公司喜中2019年广西森林资源规划设计调查机载激光雷达数据获取及处理项目...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019-2025 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English