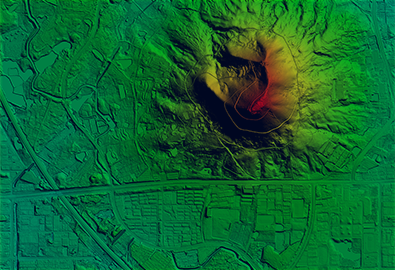
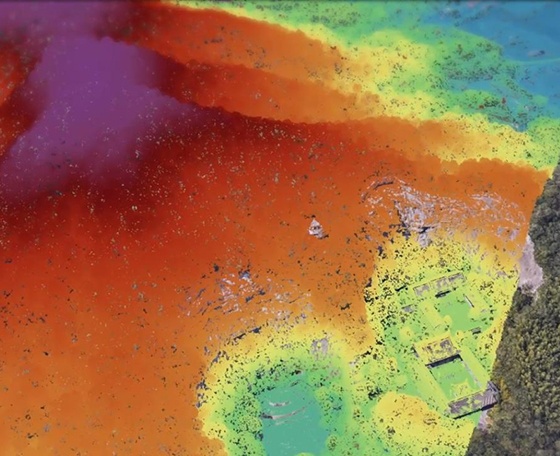
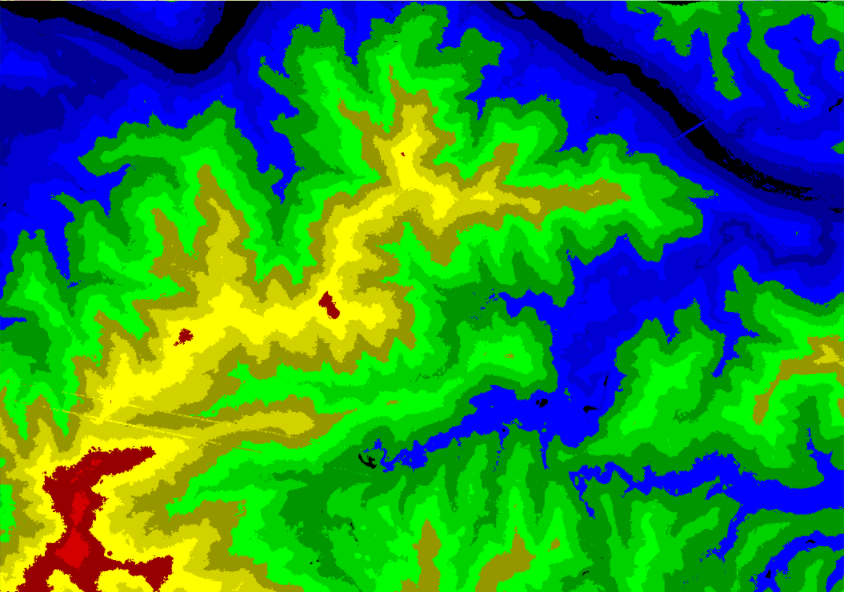
POS辅助光束法区域网平差是建立在GPS辅助光束法区域网平差基础上的一种加密方式,通过POS辅助光束法、航空摄影测量加密,快速获取精确的物象位置、信息。
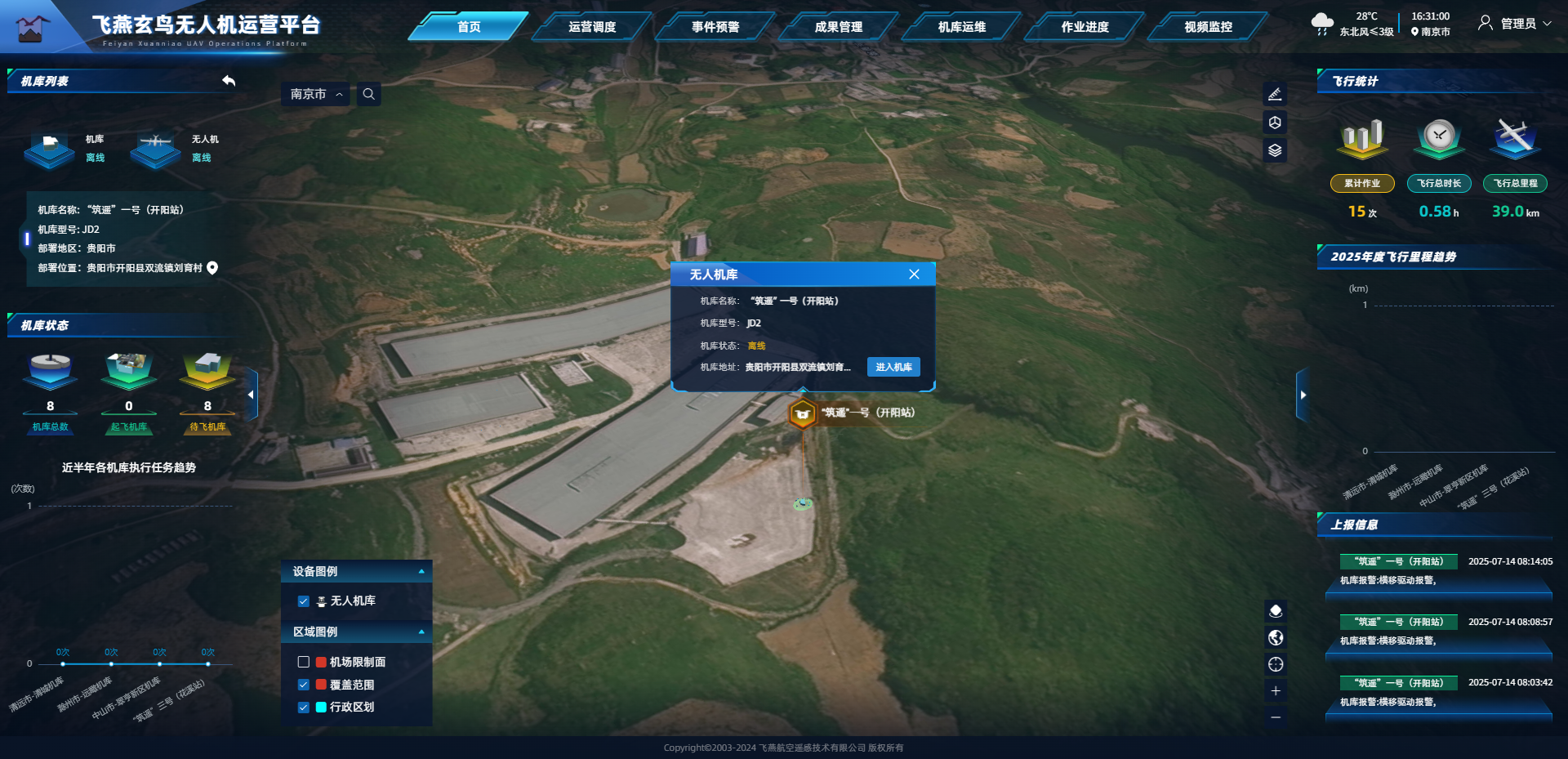
POS辅助空中三角测量的第一步是要采用载波相位动态GPS定位技术测定摄站的空间位置(简称GPS摄站坐标)、采用惯性导航技术测定航摄仪的姿态角(简称IMU姿态角)。为此,必须对现行航空摄影系统加装双频动态GPS接收机和惯性测量装置(Inertial Measurement Unit,IMU)
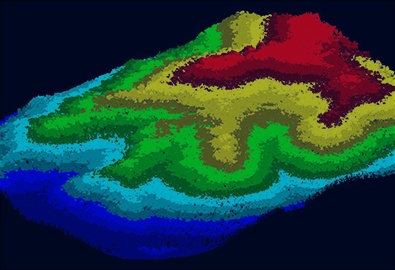
选择IMU得到的航空拍摄设备精确角度看成带权检测数据,其POS数据信息会与摄像检测信息进行融合平差。最终会呈现不同数权重的其图像的坐标位置、POS辅助光束法区域网平差,其原因是数值具有差异性。因此需要借助最小二乘平差方式进一步减少POS摄像坐标形成的误差概率,保障最终生成的图像外位置元素精确度。

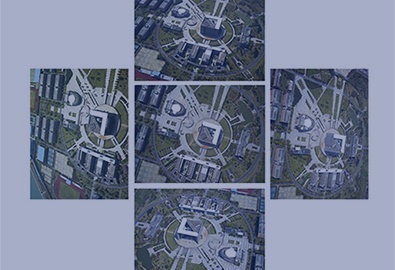
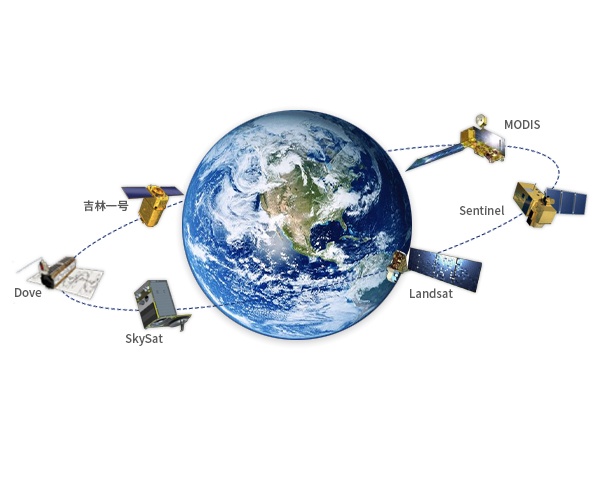
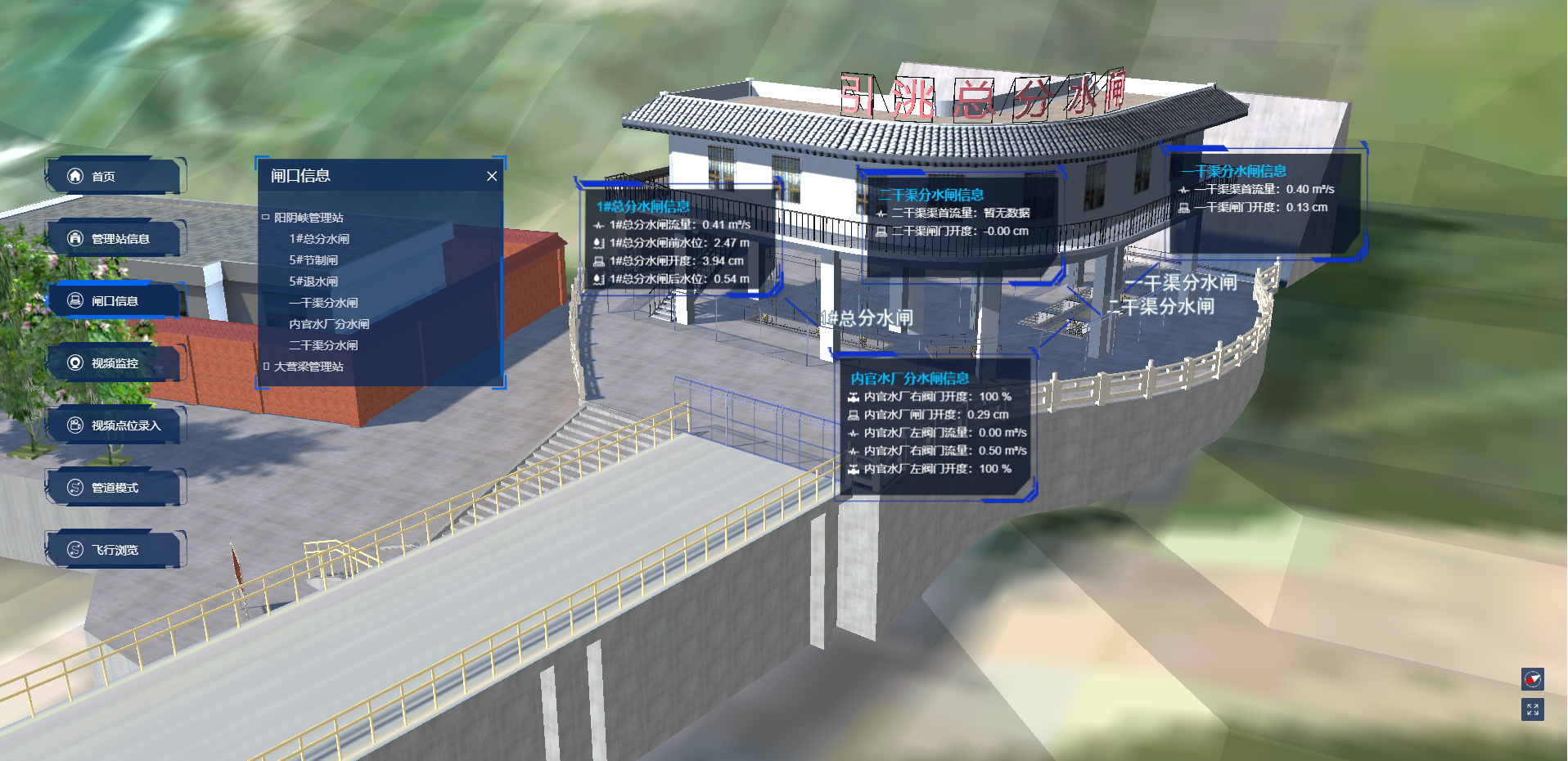
带POS的航空摄影系统

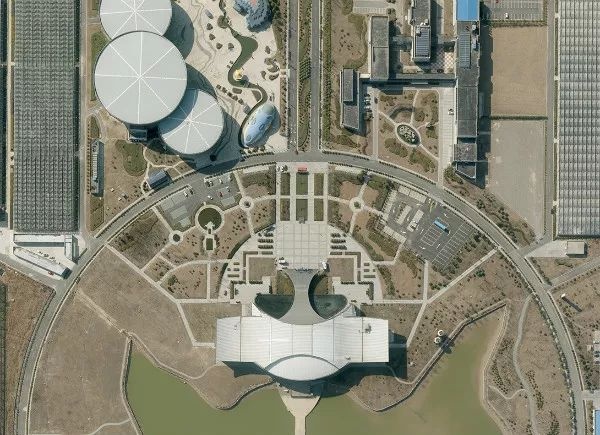
ADS系列数字航摄仪应用的是推扫式摄影方式,应用POS系统进行数字影像获取。在航空摄影测量中应用ADS系列数字航摄仪,可以不经过扫描便可以直接为遥感图像处理系统及数字摄影测量提供全色...
飞燕航空遥感技术有限公司(以下简称“飞燕遥感”)承担的“2024年深圳市航空摄影测量...
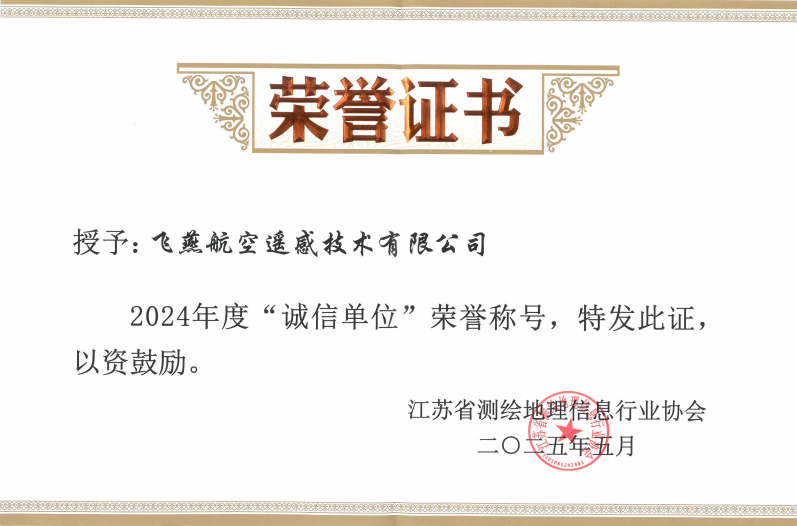
近日,江苏省测绘地理信息协会正式发布2024年度行业“诚信单位”评选结果,飞燕航空遥...

日迈月征,朝暮轮转 转眼2024年已走入尾声 这一年,我们主动拥抱新浪潮、新趋势 在...
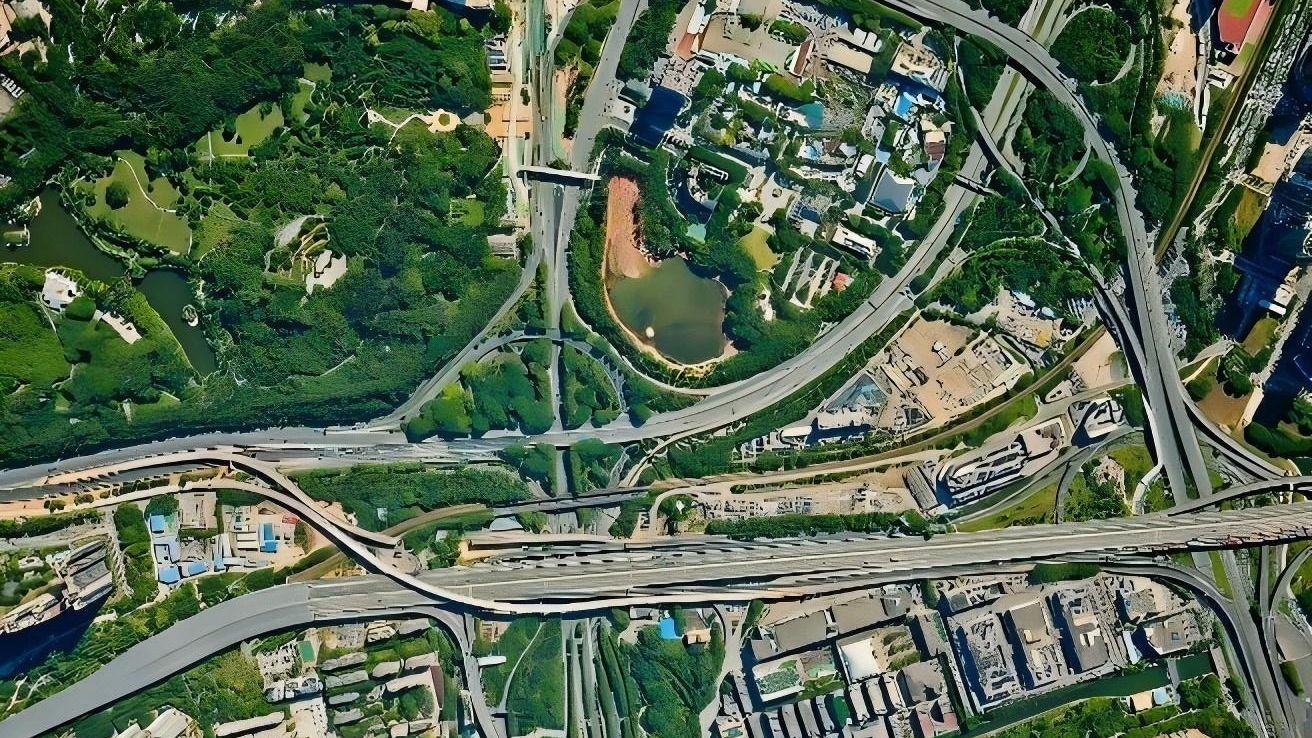
项目在苏州市区范围内实施数码航空摄影,范围覆盖苏州市区面积约4500平方公里(其中陆...
通过参与“广西森林资源调查”“安徽森林资源管理”等多个重大项目,飞燕遥感凭借自主...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019-2025 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English