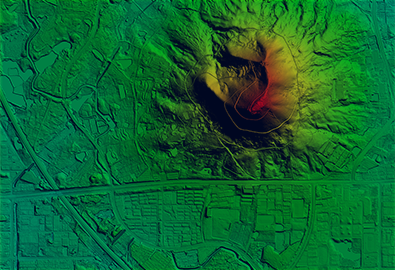
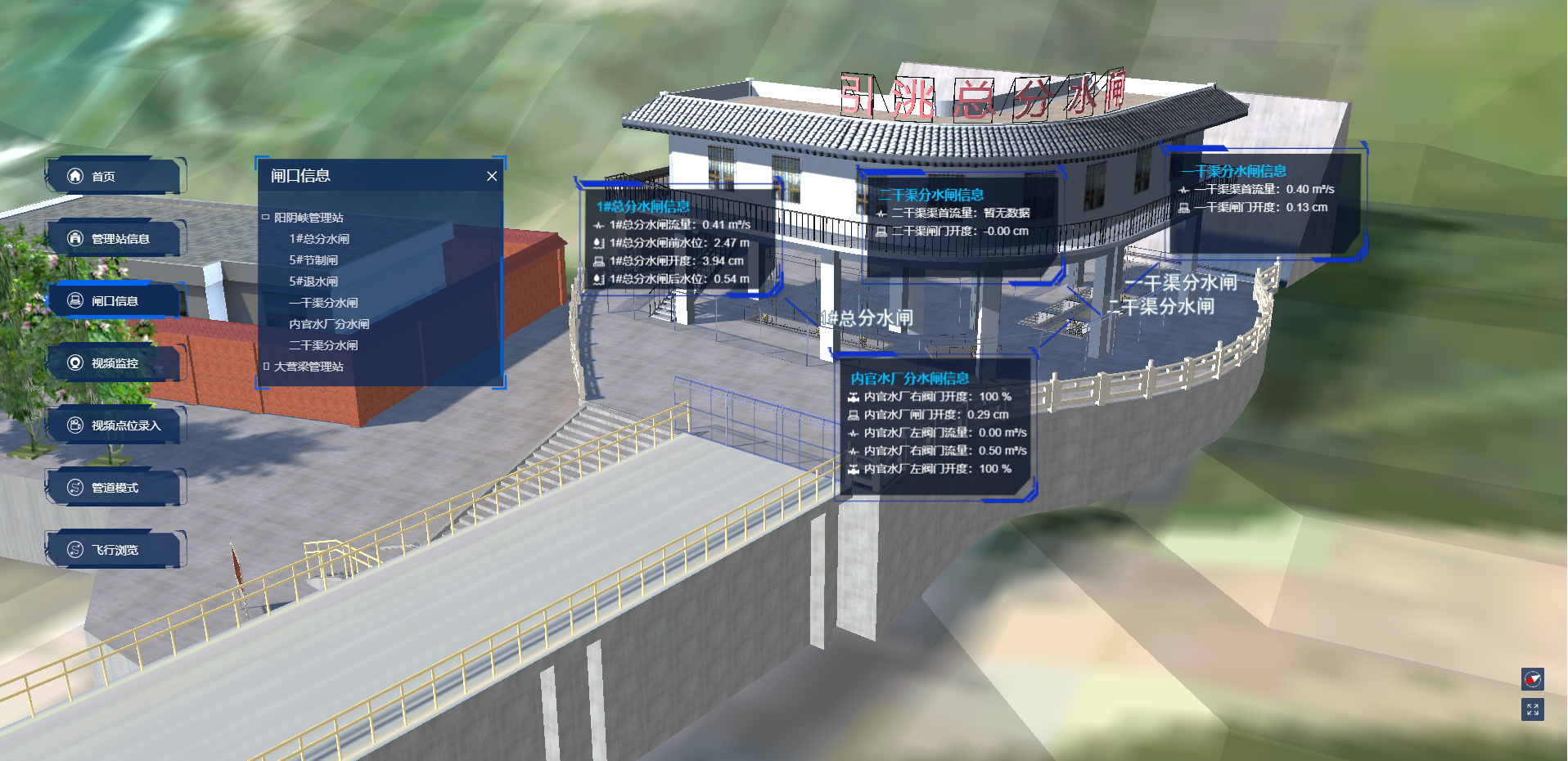
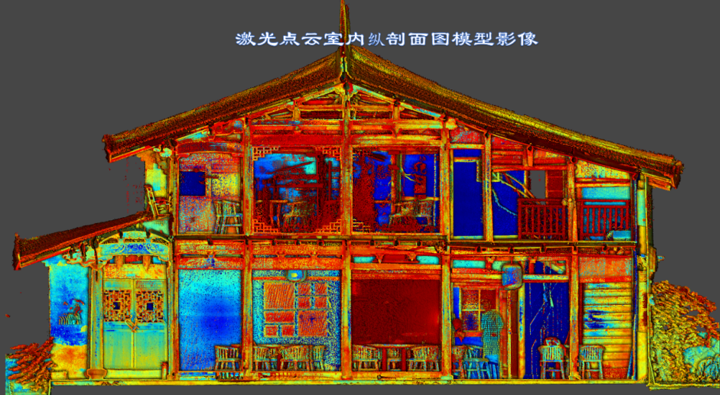
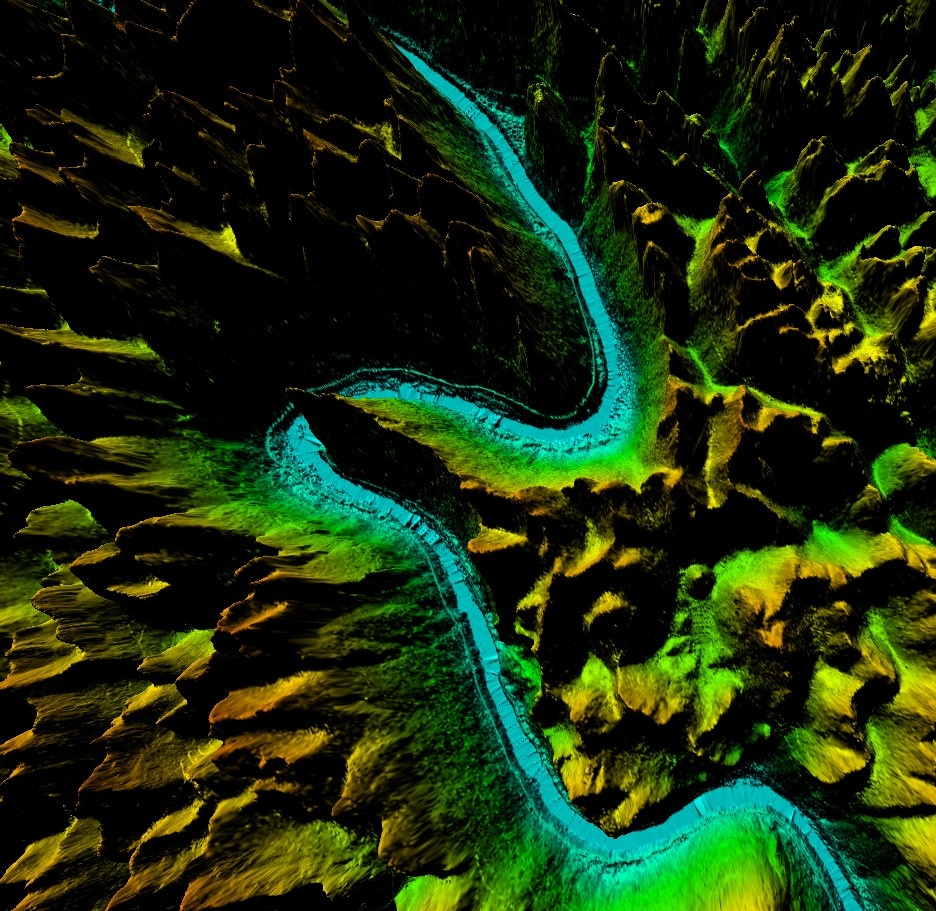
“点云”其实就是由机载激光雷达测量技术中大量密集的三维离散点数据中转变而来的,当然“点云”数据中涵盖着多种有效信息,如具有反射特征的植被、地面以及房屋等。

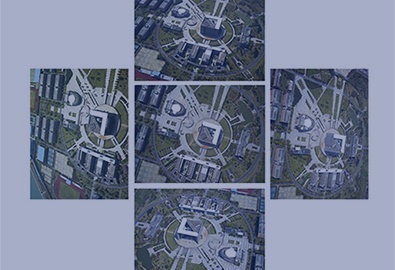
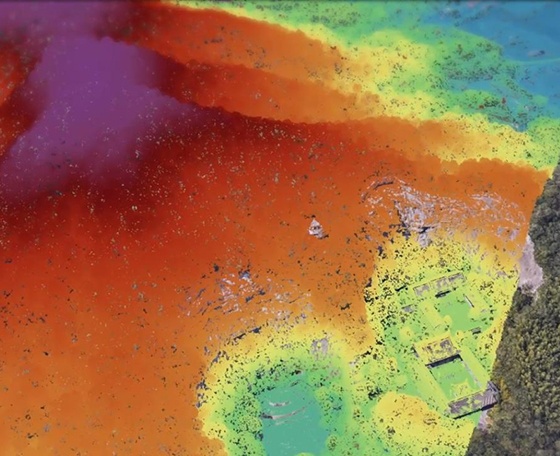
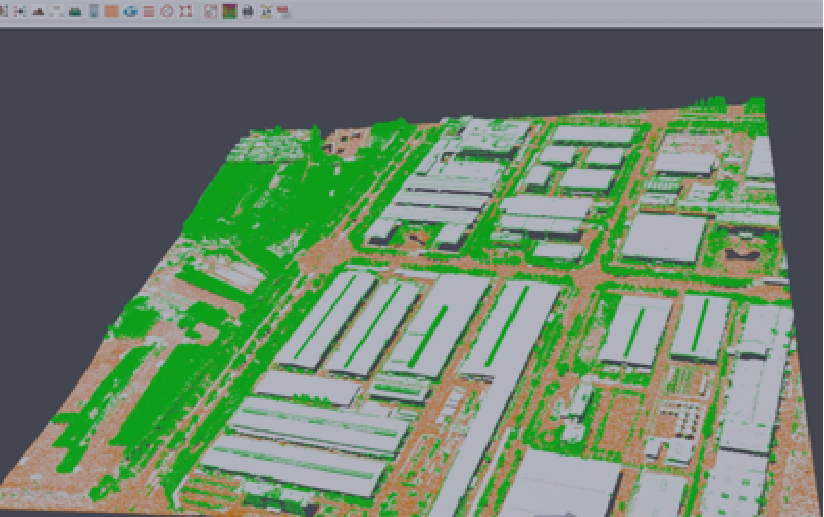
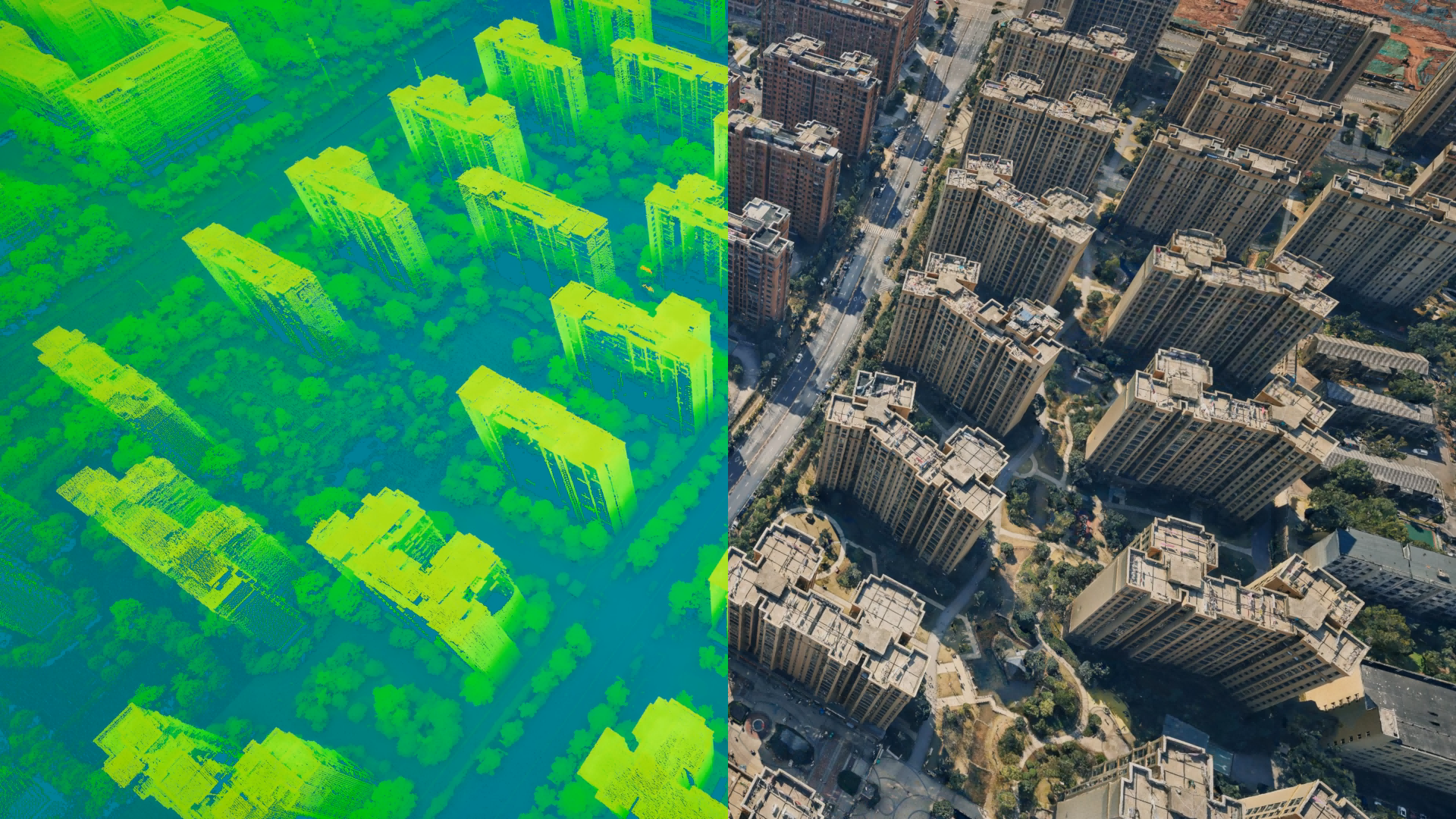
激光点云数据建筑物分类提取 P3C软件
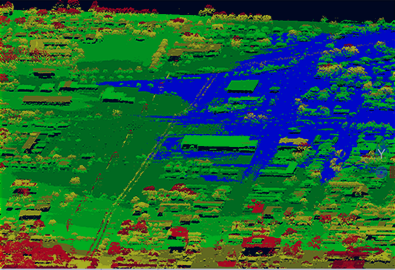
后期的“点云”数据分类要适度结合其不同高度的地面、植被或者房屋等,尽可能剔除错误的“飞点”。可反射的地面物体遇到激光,就会被反射与接受,从而得到可记录的三维属性反射点,所以具体的激光点高程与周围激光点的高程对比还是要依据“点云”数据分类原理来自动进行分类。当然此过程还需要借助人工干预,借助技术人员丰富的经验,将其“点云”数据分离处理其低地面植被中。

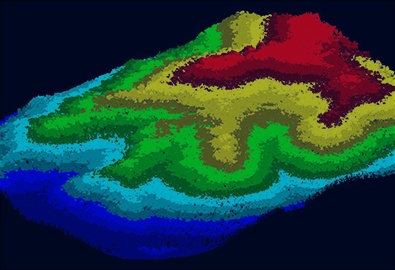
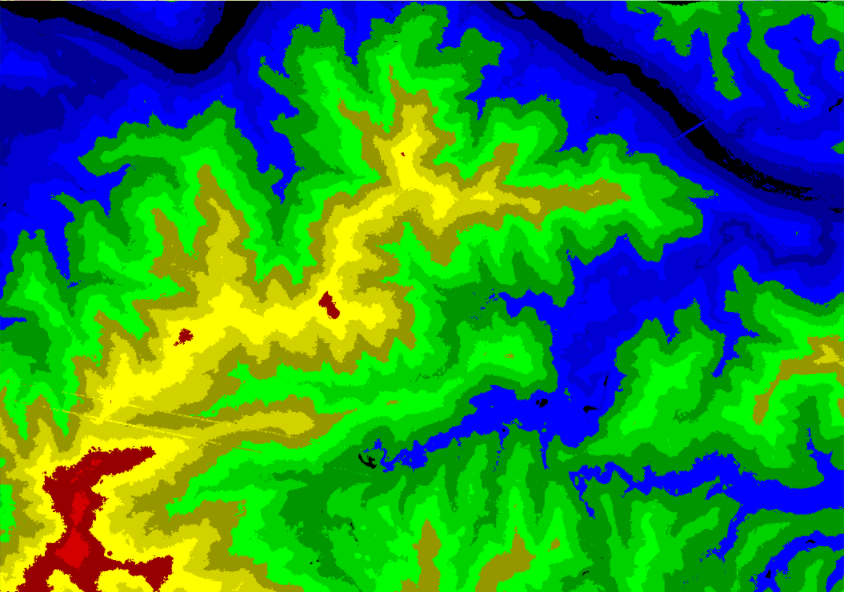
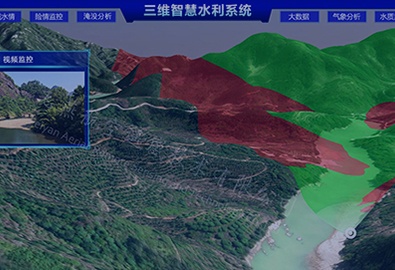
激光点云数据植被分类提取 P3C软件
飞燕遥感自主研发的一款机载LiDAR数据处理软件P3C,是一款面向对象思想独立研发的机载LiDAR数据处理软件,功能包括点云读写、显示、滤波、分割、分类、矢量计算等,允许用户自定义数据批处理流程,提取建筑物点的准确度可达95%以上。该软件已累计用于数十万平方公里的点云数据处理,获得三项国家发明专利和一项软件著作权授权,发表核心期刊论文一篇。
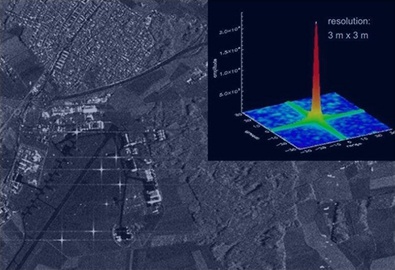
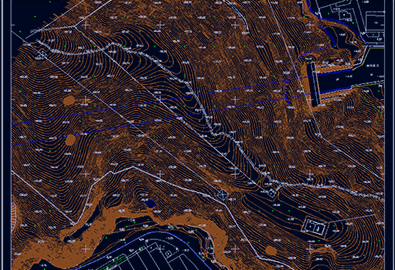
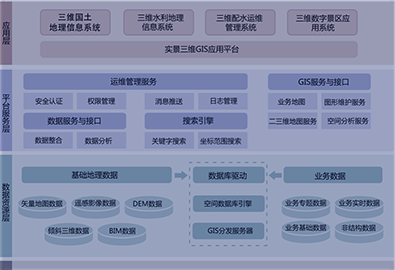
机载LiDAR可快速获取高精度、高密度的地表三维坐标信息数据。这些数据是一系列空间分布不均匀的离散点云数据,如何对这些数据进行滤波是当前国内外研究的热点,现有滤波算法大多都是基于...
公司具备PB级处理能力,通过自主研发了P3C、ImgTools、CloudTools等软件,将海量多源数...

南京师范大学随园校区承载着厚重悠远的百年文脉,浸润着“东方最美校园”的灵秀之气。...

飞燕遥感承接了近万平方公里的点云及影像数据采集的新能源测图项目并顺利验收。项目通...

近日,湖北省经信厅发布《2022年度湖北省创新产品应用示范推荐目录》(以下简称《目录...
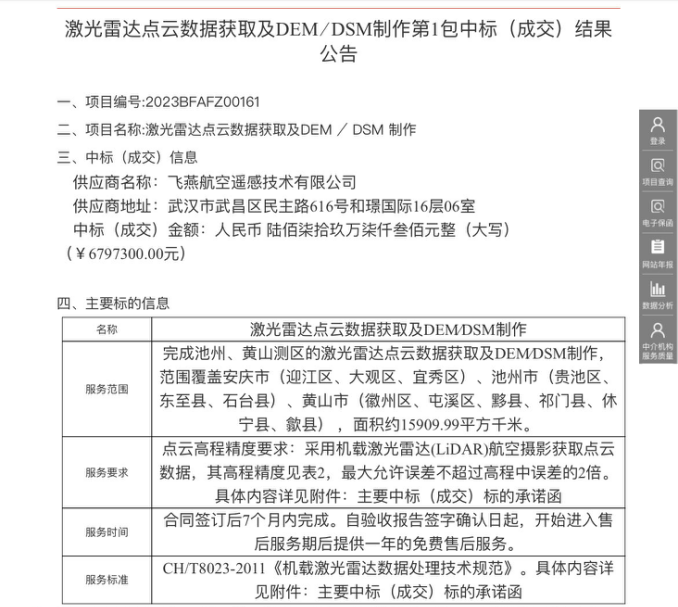
近日,飞燕遥感喜中2023年安徽省机载激光雷达点云项目,中标金额6,797,300元。 此次...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019-2025 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English