影像匹配是数字摄影测量与计算机视觉的关键技术之一,基于灰度和基于特征的影像匹配方法,在航摄项目实际应用中,为了获得高效、高精度和高可靠性的影像匹配效果,两种方法往往并存于一个系统中。然而,这些方法并不能完美解决倾斜航摄影像的匹配问题。
众所周知,所有中心投影影像在局部范围内可以近似为仿射变换,而在常规的航空摄影中,由于航摄飞行平台姿态比较稳定,且保持垂直摄影,此时的仿射变换可以近似为相似变换。因此,无论是基于灰度的影像匹配还是基于特征的影像匹配方法,均能获得不错的匹配效果。

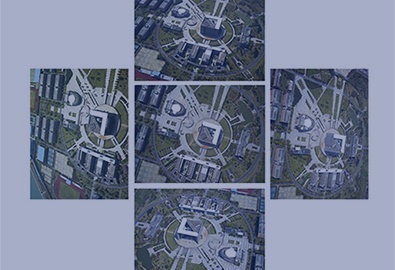
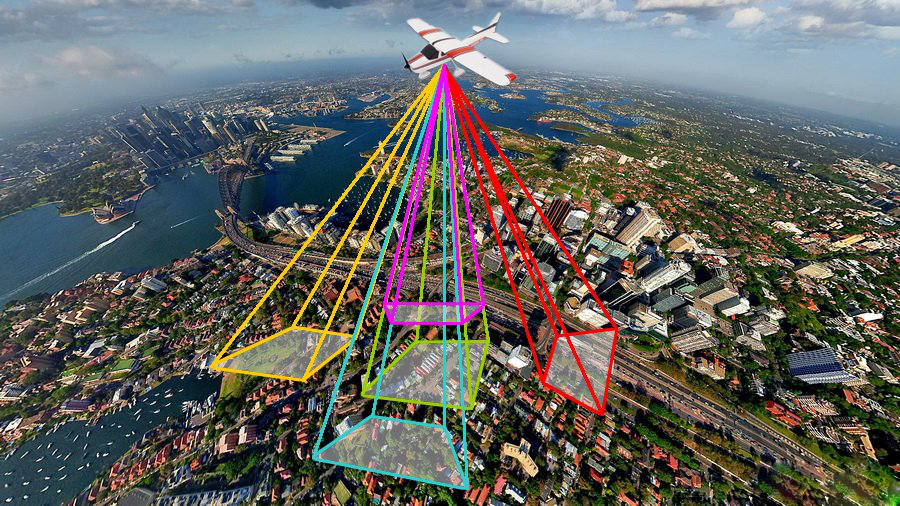
倾斜航摄是将多个传感器搭载于一台飞行器上进行多角度的拍摄,侧视相机与下视相机、侧视相机之间均存在较大的摄影角度差异。使用基于灰度的影像匹配方法时,若不事先对影像匹配窗口进行预改正,即使是同名像点之间的相似性测度也是一个不确定的值。另一方面,当前大部分特征点提取算子都只能保证相似不变性。
因此,当相邻影像间的变换关系为仿射变换时,就难以提取到重复的特征点,此时的影像匹配理论必失效。
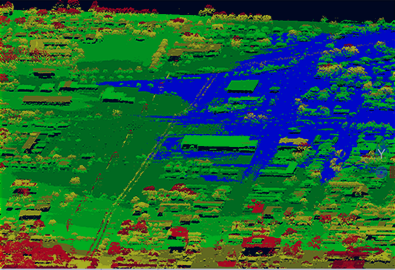
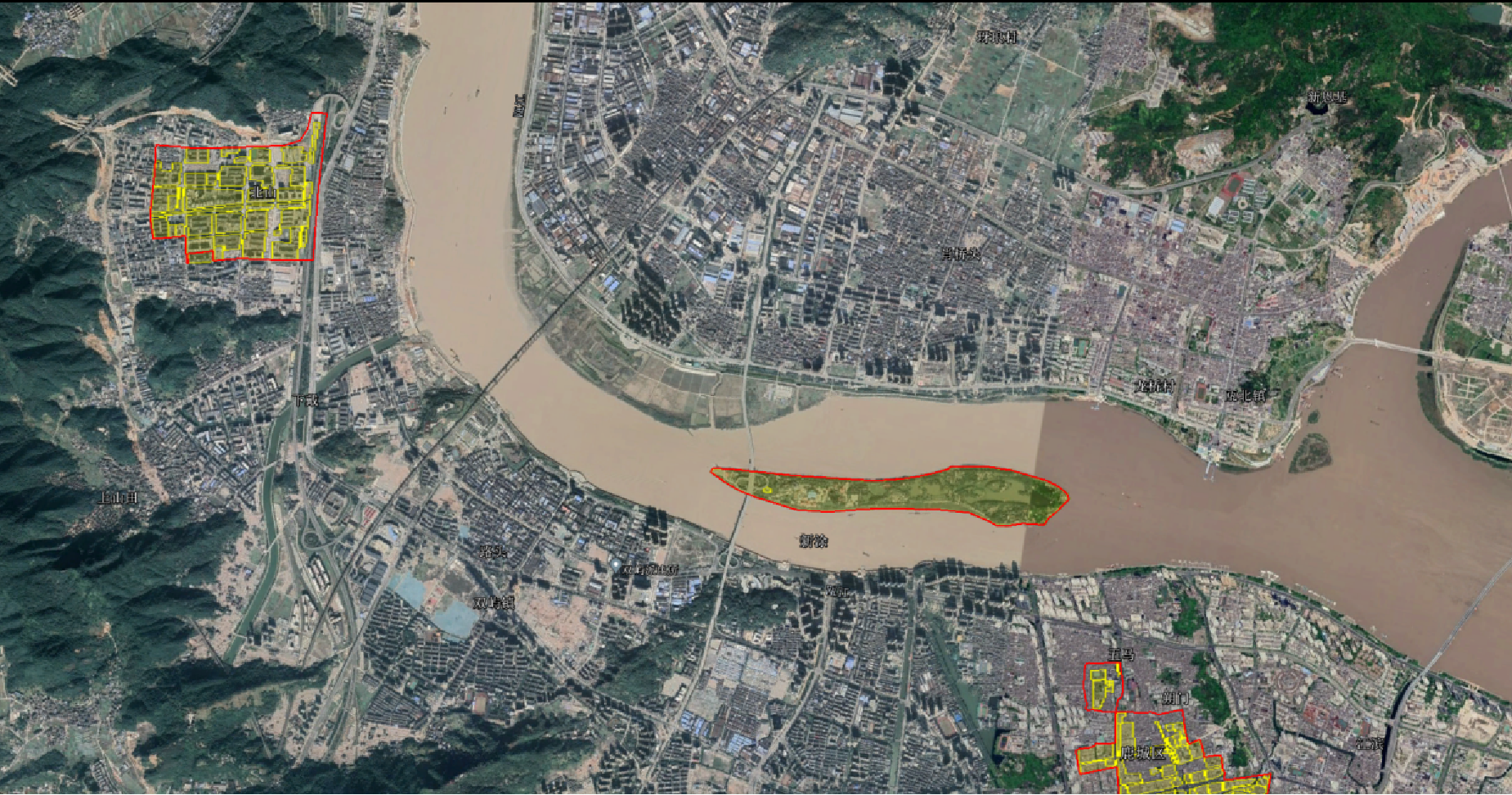
从倾斜航摄摄影角度来说,如果航摄项目的摄区面积大部分是城区,那么遮挡现象就会普遍存在,再加上影像中大多数航摄区域都是人工地物,这对特征提取非常不利。
另外,遮挡现象的会形成大量影像遮蔽区域,即使采用具有仿射不变性的特征提取算子,提取到的特征点也难以均匀分布。
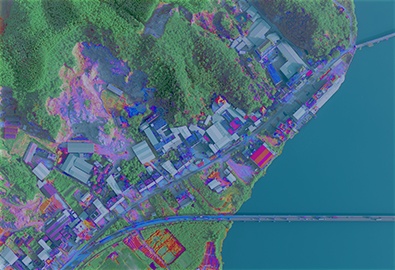
2)倾斜航空摄影主要用于城市三维建模,以自然地物为主的特征点在影像中表现出稳定的重复率,而人工地物由于形状规则,其边缘在影像中表现为高频成分,这部分特征往往不稳定。就城区而言,高楼林立,再加上倾斜航摄影像自身的几何特性,更加剧了影像匹配的难度。
采用影像纠正的匹配方法除了对输入数据有较高的要求之外,在影像匹配精度上同样会存在一些问题,显然不是倾斜航摄影像自动量测的最佳解决方案。
对于存在仿射变形的倾斜航摄影像的匹配问题,可以首先使用仿射不变特征提取算子(如联合使用 Hessian 和 Harris 特征)提取特征点,然后使用三阶图匹配算法去匹配这些特征点,从而解决倾斜航摄影像的匹配问题。
误匹配点剔除是影像匹配过程中一个必不可少的重要环节。
对常规航摄影像而言,初始值的获取比较容易,但对于倾斜航摄影像,在没有任何先验知识的情况下,很难获取到位于收敛域范围内的初始值。另一方面,迭代次数与粗差和初始值精度密切相关,当粗差率较高、初始值较差时,迭代时间会加长,收敛速度会很慢。因此,在倾斜航摄影像的误匹配点检测中,常常使用基于 RANSAC 粗差检测框架的粗差探测方法。
版权声明:文章来源于网络,由飞燕航空遥感www.feiyantech.com编辑,登载此文出于传递更多信息之目的,版权归原作者及刊载媒体所有,如本文中图片或文字侵犯您的权益,请联系我们。
猜你喜欢:


倾斜航摄是近年来发展起来的一项新技术,基于倾斜摄影测量模型重建技术因其数据采集成本低、效率高,重建的三维模型现势性好等特点,将倾斜摄影测量三维建模技术应用于不动产测绘实际生产...
利用倾斜航摄技术进行城市三维模型数据生产,具有快速高效、模型纹理真实、数据精度高等...

承担了义乌市三维城市建模、黄山市三维城市建模、合肥市三维城市建模、福州市城区LIDA...
影像匹配是数字摄影测量与计算机视觉的关键技术之一,基于灰度和基于特征的影像匹配方法...
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019-2025 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English