倾斜摄影模型单体化主要包括矢量切割单体化、矢量叠加单体化和模型重建单体化3种方式。
三维模型单体化修改的建模软件有哪些呢,给大家简单介绍以下常用的几款软件: 1.简称3d Max; 2. DP-Modeler; 3.Meshmixer; 4. Geomagic Studio
航空摄影技术作为一种先进的测量技术,已经得到了人们的广泛认可。相关勘测人员通过在空中进行全景图片的拍摄和加工处理,能够完成具体的工程测绘。在进行测绘测量的过程中,由于航空摄影技术的应用范围广泛,操作简便,已经得到了人们的广泛运用,能够完成传统人工测量无法完成的工作,并且数据的准确...
20世纪30年代以来,航空摄影测量的测图方法主要有3种,即航空摄影测量综合法、航空摄影测量全能法和航空摄影测量分工法(或称微分法)。
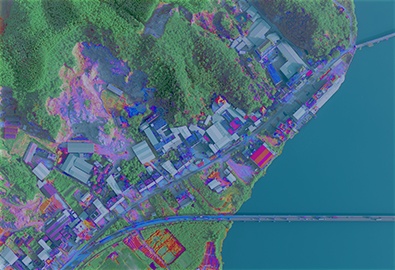
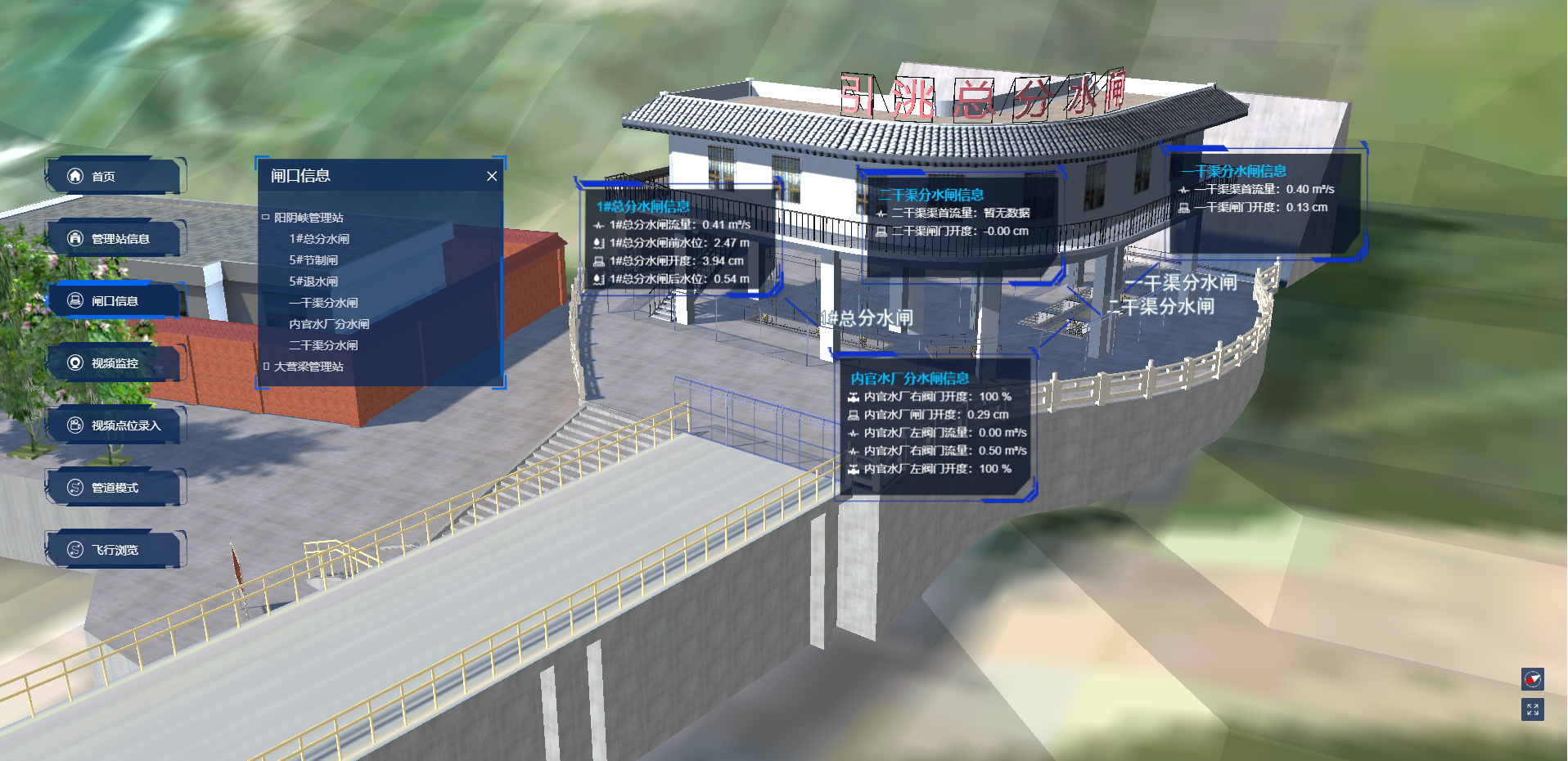
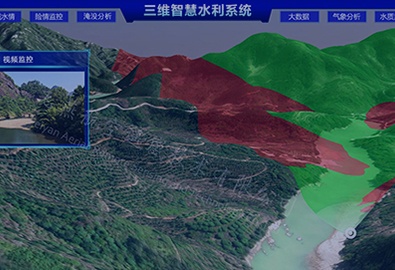
实景三维技术是一种通过采集、处理、分析真实世界的地理信息,构建高精度、高分辨率的三维模型的技术。在中国,实景三维技术正在成为推动数字化转型的重要手段,为城市发展、规划、管理和应急救援等领域提供了强大的数据支持。
航摄是通过有人机或者无人机对着目标物进行航拍摄影,并将这些航拍影像转化为数据,通过软件能分析目标物最近的现状,并及时分析和对未来进行及时预判。
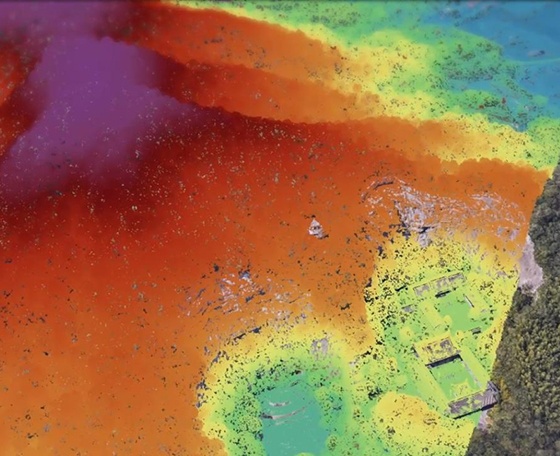
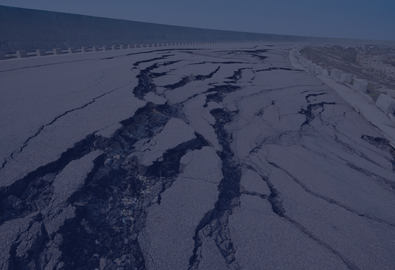
因为多种原因,栅格数据中经常存在一些无效像素。在航天测绘遥感中,遥感器获取的单景影像在经过投影坐标变换后往往会存在黑边(见图 1(a)),黑边内的像素为无效像素。在航空测绘遥感中,位于测区外的像素也可能被拍摄/扫描到,但是在成果交付时往往只需要输出测区内的像素,测区外的像素即为无效像素...
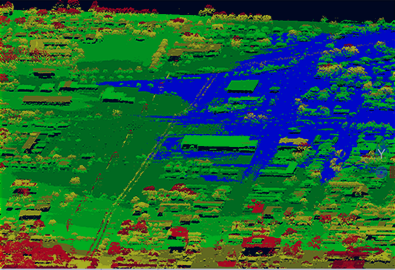
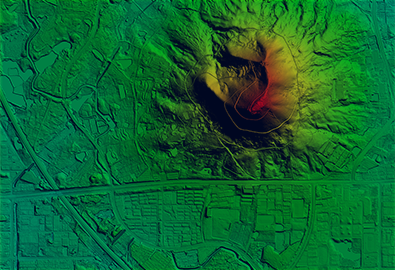
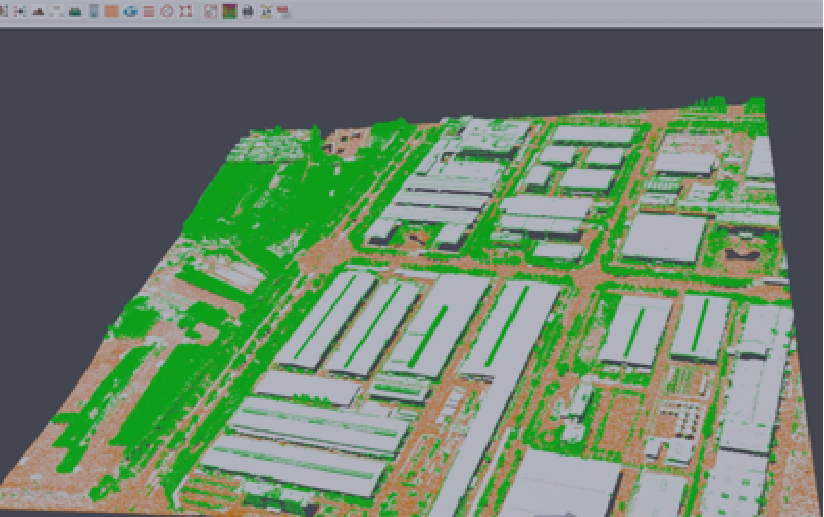
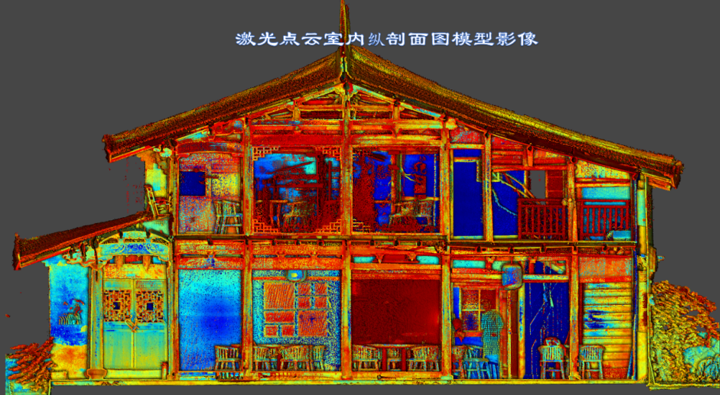
采用 DJI Terra 软件解算前期采集的激光雷达扫描数据,输出原始点云数据,采用 LIDAR360、点云智绘软件对 DJI Terra 生成的点云数据进行点云去噪、点云分类、点云编辑、点云重采样等步骤,生成符合要求的雷达点云数据。
实景三维中国建设中机载激光雷达(lidar)数据获取过程详解,机载激光雷达系统基于其主要构件发挥有效作用,系统内有飞行平台、传感器等,保证日常运营平稳。系统激光扫描仪可以通过仪器设备不断发送脉冲传感,包括定位与测量单元保证应用中的精准测量,最后控制单元作为整个系统的核心装备可以进行数据整...
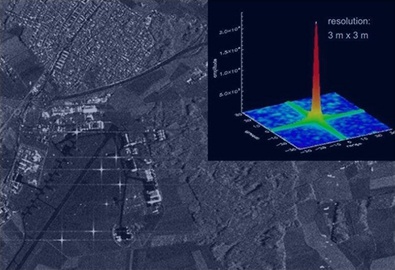
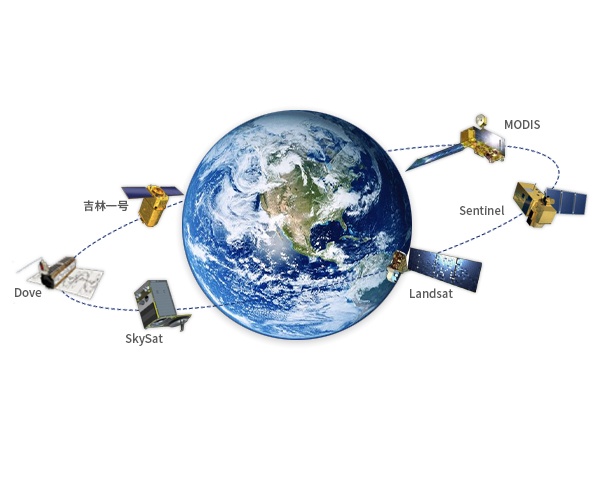
在视觉三维领域中,卫星测绘是指通过遥感卫星对地成像观测和数据处理而进行测量和绘图。在精度和覆盖面的规定要求下,卫星遥感影像具有全地表覆盖、获取成本低且较高的分辨率等优势,已经成为地形级实景三维构建的重要数据源。
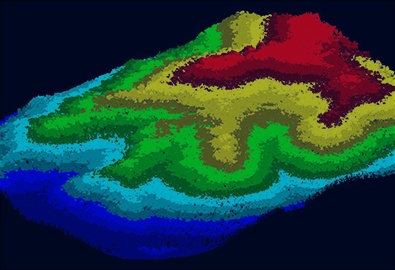
通过激光探测与测量(LiDAR)获取的数据就是激光点云数据。LiDAR 获取数据的方式主要分为三大类:星载、机载和地面。星载 LiDAR 采用卫星平台,运行轨道高、观测视野广,基本可以测量到地球的每一个角落。机载主要借助无人机(UAV/UAS)进行大规模的点云数据采集。地面分为三种:地上三维激光扫描、车载...
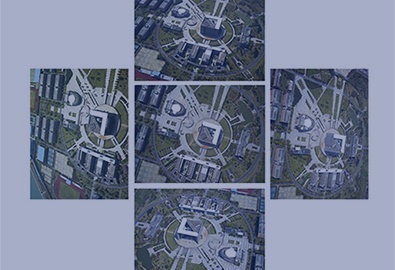
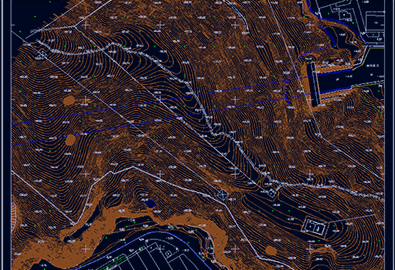
依托于倾斜摄影测量技术的迅速发展,数据采集技术已经具备从机载平台高效、高精度、低成本地获取大范围三维地表信息的能力并在实景三维建设中发挥着重要作用。然而,基于倾斜摄影技术生成的三维模型存在“一张皮”的表象,难以支撑地理实体的语义查询和分析,因此也需要相应的技术来进行后续处理。
电话:025-83216189
邮箱:frank.zhao@feiyantech.com HR@feiyantech.com(人力资源)
地址:江苏省南京市玄武区红山街道领智路56号星河World产业园3号楼北8楼

微信公众号

总经理微信
版权所有:飞燕航空遥感技术有限公司 © 2019-2025 备案号:鄂ICP备19029994号-1 苏ICP备20022669号-1  鄂公网安备:420106020021194号
鄂公网安备:420106020021194号  简体中文/English
简体中文/English